Einrichtung – UAV-Montage
- Einzelheiten zur Montage des Luftfahrzeugs finden Sie in der UAV-Montageliste in Abschnitt 4.2.2 der MAVinci-Bedienungsanleitung.
- {PIC} Nehmen Sie den UAV-Rumpf aus dem Transportkoffer und entfernen Sie die Kunststoffhülle.
- {PIC} Entfernen Sie die Kunststoffhülle vom Rumpf.
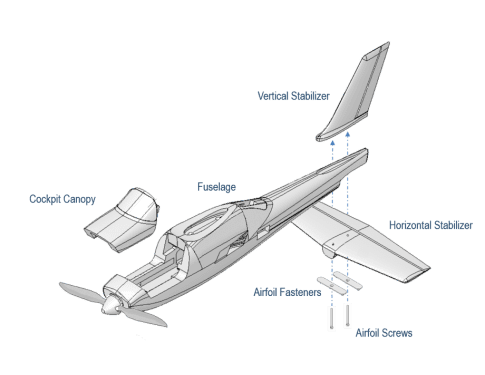
- {PIC} Legen Sie die vier Flossenschrauben samt Befestigungselementen und einen Schlitzschraubendreher bereit.
- {PIC} Nehmen Sie die Seiten- und Höhenflosse aus dem Transportkoffer.
- {PIC} Befestigen Sie die beiden Flossen mit den Schrauben am Rumpf. Ziehen Sie die Schrauben zunächst handfest an, dann mit dem Schlitzschraubendreher. Ziehen Sie die Schrauben nicht zu fest an.
- {PIC} Stellen Sie sicher, dass die Höhen- und Seitenflosse fest am Rumpf montiert sind:
- Beim Hin- und Herbewegen der Höhenflosse darf keine oder kaum Bewegung zu sehen sein. Drehen Sie die Schrauben ggf. jeweils eine halbe Drehung zur Anpassung.
- Es darf kein Spalt zwischen der Unterseite der Höhenflosse und dem UAV-Rumpf zu sehen sein.
- {PIC} Schließen Sie die elektrischen Steckverbinder der Höhen- und Seitenflosse am Rumpf an.
Einrichtung – UAV-Montage
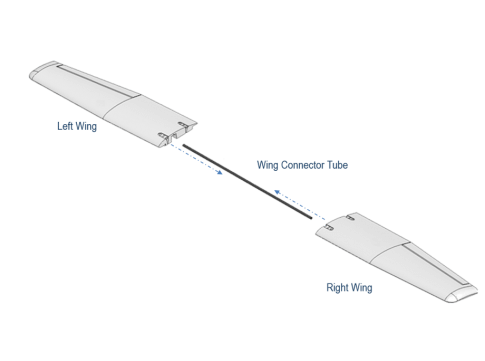
- {PIC} Nehmen Sie das linke und rechte Tragflächenverbindungsrohr aus dem Deckeleinsatz des Transportkoffers.
- {PIC} Bestimmen Sie mittels Maßband die Mitte des Verbindungsrohrs. Markieren Sie die Mitte mit einem Stift oder einem kleinen Stück weißen Klebebands.
- {PIC} Nehmen Sie die linke und rechte Tragfläche aus dem Transportkoffer.
- {PIC} Führen Sie das Tragflächenverbindungsrohr in eine der Tragflächen ein, bis die Markierung erreicht ist. Führen Sie nun das andere Ende des Rohrs in die andere Tragfläche ein, sodass es hälftig in beiden Tragflächen sitzt.
Einrichtung – UAV-Montage
- {PIC} Legen Sie die Vorderkante beider Tragflächen bündig an die Hinterseite des UAV-Cockpits an.
- {PIC} Stecken Sie zwei Tragflächenschrauben und Befestigungselemente durch die Öffnungen in der Oberseite der Tragflächen.
- {PIC} Ziehen Sie die Schrauben zunächst handfest, dann mit einem Schlitzschraubendreher an, um die Tragflächen fest mit dem UAV-Rumpf zu verbinden. Ziehen Sie die Schrauben nicht zu fest an.
- {PIC} Stellen Sie sicher, dass beide Tragflächen fest und sicher am Rumpf befestigt sind.
- Heben Sie das UAV an der vorderen Kante der beiden Tragflächen an.
- Blicken Sie aus 5 bis 8 cm auf den Bug und drehen Sie das UAV schnell um die Hochachse hin und her.
- Stellen Sie sicher, dass es keine bis kaum eine Bewegung zwischen Tragflächen und Rumpf gibt. Drehen Sie die Schrauben ggf. jeweils eine halbe Drehung zur Anpassung.
- {PIC} Schließen Sie die elektrischen Steckverbinder der Tragflächen an den UAV-Rumpf an.
- Der Steckverbinder der linken Tragfläche gehört an den Anschluss links am Rumpf. Der rechte Steckverbinder an den Anschluss rechts.
Einrichtung – UAV-Montage
- {PIC} Entfernen Sie das Sicherungsband für den Motor vom Propeller und nehmen Sie das Cockpitdach ab.
- {PIC} Legen Sie einen geladenen LiPo-Akku so in das UAV-Cockpit, dass die Kanten des Akkus mit den Markierungen innen im Cockpit übereinstimmen.
- Stellen Sie jetzt noch keine Verbindung zwischen LiPo-Akku und UAV her.
- {PIC} Fixieren Sie den LiPo-Akku mithilfe des Gurts im Cockpit.
- {PIC} Bringen Sie das Cockpitdach und das Sicherungsband für den Motor wieder an.

Einrichtung – UAV-Montage
- {PIC} Nach der UAV-Montage und dem Einsetzen des LiPo-Akkus muss die UAV-Balance in einem möglichst windstillen Bereich kontrolliert werden.
- {PIC} So kontrollieren Sie die UAV-Balance:
- Heben Sie das montierte UAV an den Vorderkanten der Tragflächen an.
- Legen Sie die Mittelfinger unter die Balancemarkierungen an der Unterseite der Tragflächen und halten Sie das UAV hoch.
- Es sollte parallel zum Boden liegen; die Nase darf bis etwa 1 Grad nach unten geneigt sein.
- {PIC} Falls bei der Balancekontrolle die UAV-Nase nach oben oder um mehr als ein Grad nach unten geneigt ist:
- Entfernen Sie das Sicherungsband für den Motor vom Propeller und nehmen Sie das Cockpitdach ab.
- Korrigieren Sie die Lage des LiPo-Akkus im UAV-Cockpit. Fixieren Sie anschließend den LiPo-Akku.
- Setzen Sie das Cockpitdach auf und bringen Sie das Sicherungsband wieder an.
- Kontrollieren Sie die UAV-Balance erneut.

Einrichtung – UAS-Vorflug-Kontrolle (Einrichtung der internen RTK-Basis)
- Einzelheiten zur Vorflug-Kontrolle finden Sie in Abschnitt 4.2.4 der MAVinci-Bedienungsanleitung.
- {VO/FA} Nehmen Sie die GNSS-Antenne und das GNSS-Antennenkabel aus dem MAVinci-Transportkoffer (oder dem Behältnis, in dem diese aufbewahrt werden).
- {VO/FA} Stellen Sie die GNSS-Antenne auf einem Stativ mit Dreifuß oder einem Stativ mit fester Höhe über dem Basispunkt auf.
- {VO/FA} Ermitteln Sie mit einem Maßband die lotrechte Antennenhöhe (nicht die Schräghöhe) des ARP der GNSS-Antenne.
- {VO/FA} Nehmen Sie den WLAN-Connector und einen vollständig geladenen LiPo-Akku aus dem Transportkoffer.
- {VO/FA} Schließen Sie das GNSS-Antennenkoaxialkabel an der GNSS-Antenne und am WLAN-Connector an.
- {VO/FA} Stellen Sie den WLAN-Connector an einem sicheren Ort auf, an dem die WLAN-Antenne freie und unbehinderte Himmelssicht hat.
- {VO/FA} Stellen Sie den LiPo-Akku ebenso auf und schließen Sie ihn am WLAN-Connector an, um letzteren mit Strom zu versorgen.
- {VO/FA} Prüfen Sie am WLAN-Connector die folgenden Punkte:
- Die Betriebs-LED leuchtet.
- Die GPS-LED zeigt an, dass der WLAN-Connector GNSS-Satelliten verfolgt.
- Die Status-LED beginnt etwa 30 Sekunden nach dem Einschalten schnell zu blinken.
- {VO/FA} Suchen Sie auf dem Nutzer-PC den MAVinci-Connector als Drahtlosnetzwerk. Stellen Sie eine WLAN-Verbindung dazu her. Hinweis: Das WLAN-Passwort für den MAVinci-Connector lautet „mavinciconnector“.
- {VO/FA} Öffnen Sie MAVinci Desktop. Erstellen oder öffnen Sie eine Sitzung und wählen Sie Start without connection to UAV (Ohne Verbindung zum UAV starten) aus.
- {VO/FA} Klicken Sie im Sitzungsfenster von MAVinci Desktop auf Internal Base Station (Interne Basisstation).
- {VO/FA} Konfigurieren Sie die Einstellungen der Basisstation und klicken Sie auf Start Internal Base Station (Interne Basisstation starten).
- {VO/FA} Stellen Sie sicher, dass das Symbol für die interne Basisstation in der Kartenansicht dargestellt wird.
- {VO/FA} Bestimmen Sie ggf. mit einem GNSS-Vermessungssystem die Position aller Bodenpasspunkte im Projektareal, die eventuell für Qualitätssicherung und Qualitätskontrolle der ausgewerteten UAS-Daten benötigt werden.
- Die Bodenpasspunkte sollten im WGS84-Koordinatensystem vorliegen oder einem anderen System, das in MAVinci Desktop verwendet wird.
Einrichtung – UAS-Vorflug-Kontrolle
- {PIC} Entfernen Sie das Sicherungsband für den Motor vom Propeller und nehmen Sie das Cockpitdach ab.
- {PIC} Verbinden Sie den LiPo-Akku mit dem UAV.
- Hinweis: Falls eine Punktlandung geplant ist, schalten Sie das UAV am Landepunkt ein.
- {PIC} Bringen Sie das Cockpitdach und das Sicherungsband wieder an.
- {PIC} Prüfen Sie nach dem Verbinden des UAV-Akkus folgende Punkte:
- Das UAV ist betriebsbereit (eingeschaltet).
- Die Servos von Querruder, Höhen- und Seitenflosse sind betriebsbereit (und bleiben eingeschaltet).
- Der UAV-Akkustand wird am Onboard-Rumpfdisplay mit 100 % angegeben.
- Das Onboard-Display zeigt die Verfolgung von GNSS-Satelliten.
- Die LED an der rechten und linken Tragfläche blinken.
- {PIC} Nehmen Sie die Fernbedienung aus dem Transportkoffer und prüfen Sie folgende Punkte:
- Der gelbe Kippschalter steht auf Automatic.
- Der rote Kippschalter steht auf Manual (Manuell).
- Der Gashebel rechts befindet sich ganz unten.
- {PIC} Schalten Sie die Fernbedienung ein. Stellen Sie sicher, dass die Servos für Querruder, Höhen- und Seitenflosse abschalten und somit die Verbindung zur Fernbedienung bestätigen..
- {PIC} Kontrollieren Sie das Spannungsniveau der Fernbedienung: 7,4 V – 8,4 V.
- {VO/FA} Stellen Sie in der Sitzung in MAVinci Desktop die Verbindung zum UAV her.
- {VO/FA} Stellen Sie sicher, dass folgende Statusinformationen in der Kartenansicht in MAVinci Desktop angezeigt werden:
- UAV-Akkustand: 100 %
- Connector-Akkustand: 100 %
- GPS-Satelliten und Glonass-Satelliten werden verfolgt. GNSS-Lösungsqualität: RTK Fixed
- Das UAV-Symbol wird in der Kartenansicht in MAVinci Desktop angezeigt.
- Kompass: OK
- Das Höhendiagramm unter dem Sitzungsfenster sollte in Echtzeit aktualisiert werden.
- {VO/FA} Stellen Sie in den Kameraeinstellungen unter dem Begrüßungsmenü in MAVinci Desktop sicher, dass das ausgewählte und im UAV montierte Kameramodell übereinstimmen.
- {VO/FA} Erstellen oder laden Sie einen Flugplan für das Erfassungsgebiet in MAVinci Desktop.
- {VO/FA} Passen Sie ggf. die Flugplaneinstellungen an (z. B. Startposition, Bodenauflösung, Gelände, Windrichtung usw.).
Einrichtung – UAS-Vorflug-Kontrolle
- {VO/FA} Für die normale assistierte Gleitlandung müssen die Einstellungen für den Landepunkt im Flugplan nicht geändert werden.
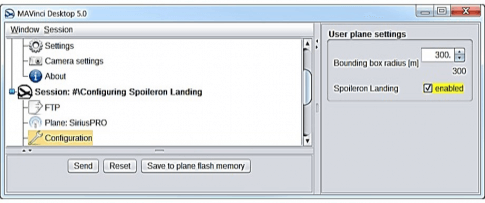
- {VO/FA} Im Falle einer Bremsklappenlandung:
- Klicken Sie im Sitzungsfenster auf Configuration (Konfiguration).
- Aktivieren Sie das Kontrollkästchen „Spoileron Landing“ (Bremsklappenlandung).
- Übertragen Sie die aktuelle Konfiguration mit Send an das UAV (nur bis zum Ausschalten des UAV aktiv).
- Aktivieren Sie ggf. das Kontrollkästchen Save to plane flash memory (Im Flash-Speicher des Luftfahrzeugs ablegen), um die Bremsklappenlandung als Vorgabe zu verwenden.
Einrichtung – UAS-Vorflug-Kontrolle
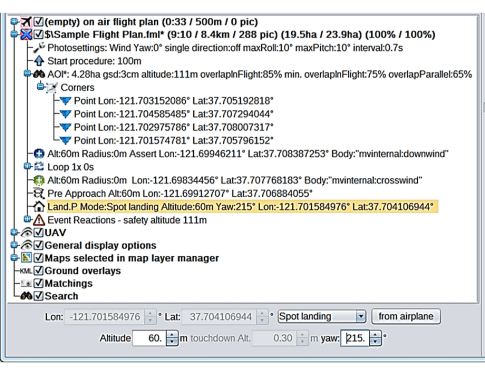
- {VO/FA} Im Falle einer Punktlandung:
- Klicken Sie im Flugplan auf Land P Mode (Lande-P-Modus).
- Wählen Sie im Pulldownmenü Spot Landing (Punktlandung) aus.
- Ein Fenster wird geöffnet. Für den Punktlandungsanflug muss die aktuelle UAV-Position gemittelt werden. Bestätigen Sie die folgenden Punkte mit einem Klick auf Ok:
- Das UAV zeigt eine RTK-Fixed-Lösung.
- Das UAV befindet sich auf dem Landepunkt und die Umgebung ist in einem Radius von 20 m frei von Hindernissen und größeren Änderungen im Geländeverlauf.
- Der UAV-Bug weist in den Wind.
- Nach dem Mitteln der UAV-Position bestimmt MAVinci Desktop automatisch den Landeanflug und passt die Flugplandaten entsprechend an.
- {VO/FA} Passen Sie die folgenden Einstellungen für die Punktladung ggf. an, damit das UAV Hindernisse im Anflugpfad umgeht:
- Gierwinkel (Kursrichtung) des Anflugs.
- Höhe über Grund vor dem Einleiten der Punktlandung entlang des Anflugweges (mindestens 50 m).
- Bei einer Flughöhe von 50 m müssen Hindernisse mindestens 5 m rechts und links entlang des Anflugpfads entfernt sein. Entlang des Pfads dürfen sie nicht höher als 5 m sein.
Einrichtung – UAS-Vorflug-Kontrolle
- {PIC} Öffnen Sie das Kamerafach am UAV und stellen Sie sicher, dass die SD-Speicherkarte in die UAV-Kamera eingelegt ist. Schließen Sie das Kamerafach danach sorgfältig.
- {PIC} Zentrieren Sie unten am UAV im Kamerabereich das Objektiv.
- {PIC} Entfernen Sie die Objektivabdeckung.
- {PIC} Stellen Sie sicher, dass auf dem UAV-Display der Hinweis „Send Flight plan“ (Flugplan übertragen) angezeigt wird.
- {VO/FA} Übertragen Sie den Flugplan zum UAV. Das Fenster „Check Wing Connection“ (Tragflächenanschluss kontrollieren) erscheint.
- {PIC} Schalten Sie den roten Schalter an der Fernbedienung auf „Autopilot“. Drücken Sie den Landeschalter. Kontrollieren Sie, ob sich beide Querruder an den Tragflächen nach oben bewegen. Stellen Sie anschließend den roten Schalter an der FB auf „Manual“ (Manuell).
- {VO/FA} Klicken Sie im Fenster „Check Wing Connection“ auf „OK“, um den Flugplan zu übermitteln. Stellen Sie sicher, dass der Flugplan zum UAV übertragen wurde.
- {PIC} Stellen Sie sicher, dass am UAV-Display „Click Flight“ (Auf Flug klicken) angezeigt wird.
- {PIC} Führen Sie die Kontrolle der Kameraauslösung und Zeitstempel durch. Drehen Sie das UAV um 60 Grad und stellen Sie sicher, dass Bilder aufgenommen, auf der SD-Karte in der Kamera gespeichert und mit der korrekten UTC-Zeit versehen werden.
- {PIC} Kontrollieren Sie die UAV-Steuerung im vollständig manuellen Modus mithilfe der Fernbedienung.
- {PIC} Kontrollieren Sie den UAV-Kompass:
- Nehmen Sie das UAV und richten Sie den Bug nacheinander in alle vier Himmelsrichtungen (N,S,O,W) aus.
- Stellen Sie sicher, dass das UAV-Symbol in MAVinci Desktop die korrekte Richtung wiedergibt.
- {PIC} Kontrollieren Sie die Flossen. Prüfen Sie die sichere Anbringung beider Flossen am Rumpf.
- Drücken Sie den Bug des UAV auf Ihren Schuh und stellen Sie sicher, dass beim Hin- und Herbewegen der Höhenflosse keine oder kaum eine Bewegung festzustellen ist. Drehen Sie die Flossenschrauben ggf. jeweils eine halbe Drehung, bis sie ausreichend angezogen sind.
- Es darf kein Spalt zwischen der Unterseite der Höhenflosse und dem UAV-Rumpf zu sehen sein.
- {PIC} Kontrollieren Sie die Tragflächen. Stellen Sie sicher, dass beide Tragflächen fest und sicher am Rumpf befestigt sind.
- Heben Sie das UAV an der vorderen Kante der beiden Tragflächen an.
- Blicken Sie aus 5 bis 8 cm auf den Bug und drehen Sie das UAV schnell um die Hochachse hin und her.
- Stellen Sie sicher, dass es keine bis kaum eine Bewegung zwischen Tragflächen und Rumpf gibt. Drehen Sie die Tragflächenschrauben ggf. um jeweils eine halbe Drehung, bis sie ausreichend angezogen sind.
- {PIC} Kontrollieren Sie die UAV-Balance. So kontrollieren Sie die UAV-Balance:
- Heben Sie das montierte UAV an den vorderen Tragflächenkanten an.
- Legen Sie lediglich Ihre Mittelfinger unter die Balancemarkierungen an der Unterseite der Tragflächen und halten Sie das UAV hoch.
- Das UAV sollte parallel zum Boden liegen; die Nase darf maximal 1 Grad nach unten weisen.
- Passen Sie ggf. die Lage des LiPo-Akkus im UAV-Cockpit an. Fixieren Sie den LiPo-Akku anschließend.
- {PIC} Durchführen der Vorflugkontrolle.
- Kontrollieren Sie den Rumpf, beide Tragflächen sowie die Höhen- und Seitenflosse auf sichtbare Schäden, die den Flugbetrieb beeinträchtigen könnten.
- Stellen Sie sicher, dass die elektrischen Steckverbinder der Höhen- und Seitenflosse und der beiden Tragflächen fest eingesteckt sind.
- Kontrollieren Sie die UAV-Propeller auf Risse oder Beschädigungen. Ersetzen Sie sie ggf.
- Stellen Sie sicher, dass die UAV-Propeller fest mit dem Motor verbunden sind. Beim Aus- und Einfalten der Propeller muss ein gewisser Widerstand zu spüren sein.
- {PIC} Durchführen der Vorflugkontrolle (Fortsetzung).
- Stellen Sie sicher, dass der UAV-Motor in beiden Richtungen frei dreht und kein Schleifen als Folge von Verschmutzungen oder Fremdkörpern zu hören ist.
- Stellen Sie sicher, dass der UAV-Akku fest im Cockpit sitzt.
- Kontrollieren Sie den inneren Kunststoffrahmen im Cockpit. Stellen Sie sicher, dass keine Risse oder Beschädigungen vorliegen.
- Stellen Sie sicher, dass das UAV-Cockpitdach fest sitzt.
- Stellen Sie sicher, dass die Kamera im Kamerafach am Boden des UAV zentriert ist.
- Stellen Sie sicher, dass der Objektivdeckel entfernt wurde.
- Stellen Sie sicher, dass das Kamerafach des UAV fest sitzt.
- Stellen Sie sicher, dass die GNSS-Antenne fest montiert ist.
- Stellen Sie sicher, dass die Kühlschlitze auf beiden Seiten des UAV-Rumpfes frei von Verschmutzungen und Fremdkörpern sind.
- Vorflug-Kontrolle abgeschlossen.