Erste Schritte: Wichtige Abkürzungen
UAS – Unbemanntes Luftfahrzeugsystem
UAV – Unbemanntes Luftfahrzeug
AGL – Über Grund
LiPo – Lithium-Polymer
VLOS – Visuelle Sichtlinie
FB – Fernbedienung
AOI – Messgebiet
GSD – Bodenauflösung
GPS – Global Positioning System
GNSS – Global Navigation Satellite System
RTK – Real Time Kinematic
GCP – Bodenpasspunkt
PIC – Pilot-in-Command
VO – Visual Observer (Spotter)
FA – Flugassistent
ATC – Air Traffic Control (Flugsicherung, Flugüberwachung)
VFR – Sichtflugregeln
AP – Autopilot
LZ – Landezone
ARP – Antennenreferenzpunkt
IMU – Inertiale Messeinheit
WLAN – Lokales Drahtlosnetz
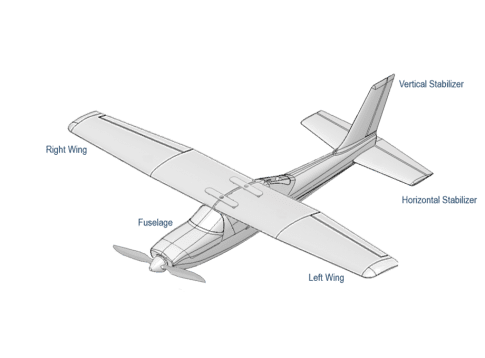
Sirius PRO - UAS-Komponenten
UAV-Rumpf – beinhaltet:
UAV-Kamera
UAV-Motor/Drehzahlregler/Propeller
GNSS-Empfänger/-Antenne
IMU und Barometer
FB-Empfänger
SIRIUS-Autopilot
Seitenflosse – regelt die Flugrichtung.
Höhenflosse – regelt die Flughöhe.
Tragflächen – ermöglichen Wenden.
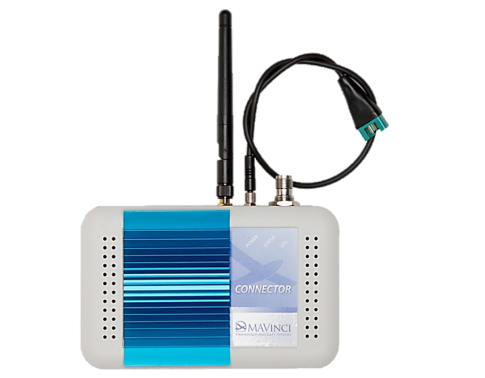
SIRIUS PRO - UAS-Komponenten
- WLAN-MAVinci-Connector
- Kommuniziert auf 2,4 GHz mit dem UAV.
- Überträgt RTK-Korrekturen an das UAV.
- Stellt die WLAN-Verbindung zum Nutzer-PC her und übermittelt UAV-Statusinformationen während des Flugs in Echtzeit, darunter:
- Akku-Ladezustand von UAV und WLAN-Connector
- Aktuelle Flughöhe und Geschwindigkeit über Grund
- GNSS-Status
- Fortschritt der Mission (in Prozent)
- FB-Verbindungsstatus
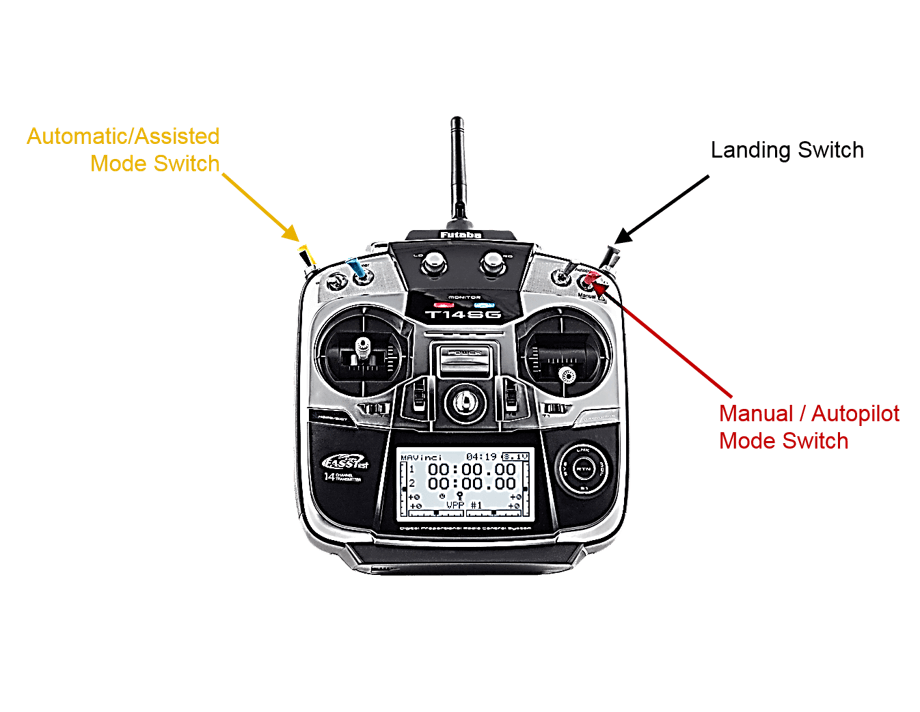
Sirius PRO - UAS-Komponenten
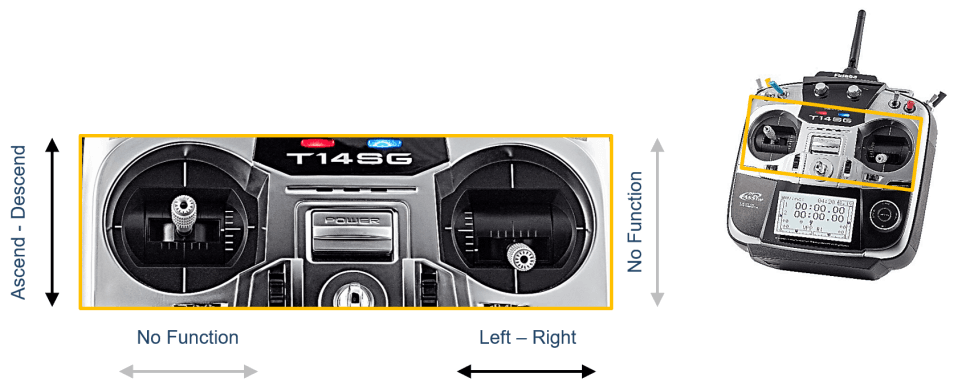
- FB-Sender
- Ermöglicht die Wahl zwischen drei Flugmodi für das UAV SIRIUS:
- Automatik – UAV reagiert nicht auf die FB und folgt dem übertragenen Flugplan.
- Autopilot-assistiert – Gashebel ohne Funktion, aber Vorgabe der Richtung (auf-/abwärts, rechts, links) durch den Nutzer. UAV reagiert weniger empfindlich auf die FB als im vollständig manuellen Modus.
- Vollständig manuell – Alle Funktionen der FB sind verfügbar.
- UAV-Motor kann bei einer Flughöhe unter 20 m AGL mit dem Landeschalter ausgeschaltet werden.
- Ermöglicht die Wahl zwischen drei Flugmodi für das UAV SIRIUS:
SIRIUS PRO - UAS-Komponenten
- FB-Sender
- Automatischer Flugmodus
SIRIUS PRO - UAS-Komponenten
- FB-Sender
- Vollständig manueller Modus

SIRIUS PRO - UAS-Komponenten
- Optionen für die Kameranutzlast
- Standard-RGB-Nutzlast
- Die Standard-Kameranutzlast für das SIRIUS-UAS besteht aus einer Fujifilm X-M1 mit 16 MP Auflösung.
- Für die Fujifilm X-M1 wird die Festbrennweite XF-18mm f/2.0 R eingesetzt.
- Die kleinste mit dieser Nutzlast erreichbare Bodenauflösung (Pixelgröße) für SIRIUS PRO beträgt 1,6 cm.
- Standard-RGB-Nutzlast

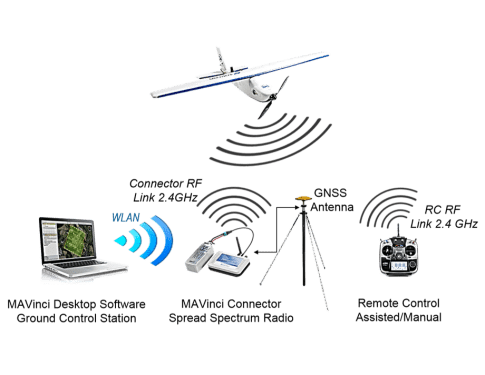
SIRIUS PRO - Zusammenfassung der Kommunikation
- SIRIUS PRO – interne RTK-Basis
- Der Nutzer-PC kommuniziert über WLAN mit dem MAVinci-Connector in MAVinci Desktop.
- Der MAVinci-Connector kommuniziert über WLAN mit dem Nutzer-PC und über 2,4 GHz mit dem UAV.
- Die GNSS-Antenne ist mit dem MAVinci-Connector verbunden, um die RTK-Basisposition zu bestimmen. Der MAVinci-Connector überträgt RTK-Korrekturen über den 2,4-GHz-Funk an das UAV.
- Die Fernbedienung kommuniziert unabhängig vom MAVinci-Connector auf der 2,4-GHz-Frequenz mit dem UAV.
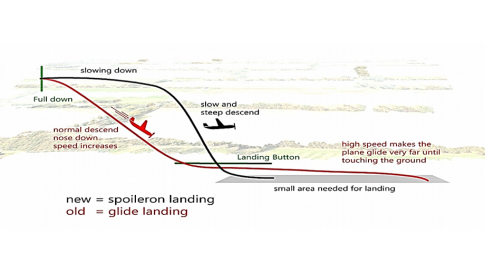
Landemodi
- Für das UAS SIRIUS PRO stehen drei Landemethoden zur Verfügung:
- Assistierte Gleitlandung
- Dies ist die Standardlandemethode für das SIRIUS-UAS.
- Während der Mission verwendet der PIC die Fernbedienung abschließend zum Landen.
- Bei der assistierten Gleitlandung sinkt das Luftfahrzeug langsam, aber mit höherer Geschwindigkeit.
- Nach dem Abschalten des Motors während der Landung wird daher ein längerer Gleitpfad benötigt.
- Assistierte Gleitlandung
- Für das UAS SIRIUS PRO stehen drei Landemethoden zur Verfügung:
- Bremsklappenlandung
- Nach der Missionsbefliegung landet der PIC das UAV mit der Fernbedienung.
- Sobald die Flughöhe 20 m über Grund unterschreitet, werden die Bremsklappen aktiviert und verzögern das Luftfahrzeug.
- Während der Bremsklappenlandung sinkt das Luftfahrzeug steil, aber relativ langsam.
- Nachdem der Motor während der Landung abgeschaltet wurde, wird ein kürzerer Gleitpfad benötigt.
- Bremsklappenlandung
- Für das UAS SIRIUS PRO stehen drei Landemethoden zur Verfügung:
- Punktlandung
- Dies ist eine automatische Landung an einem definierten Landepunkt.
- Der Landeanflug wird automatisch in MAVinci Desktop berechnet.
- Während der Punktlandung sinkt das Luftfahrzeug steil mit geringerer Geschwindigkeit.
- Für diese Funktion wird eine RTK-Abdeckung benötigt.
- Punktlandung