Configuration - Montage du drone
- Pour de plus amples informations concernant le montage de l'aéronef, consultez la liste de contrôle de montage du drone à la section 4.2.2 du manuel d'utilisation MAVinci.
- {PIC} Retirez le fuselage du drone de la valise de transport puis retirez la housse en plastique.
- {PIC} Retirez la housse en plastique autour du fuselage.
- {PIC} Préparez quatre vis et fixations pour la voilure ainsi qu'un tournevis à tête plate.
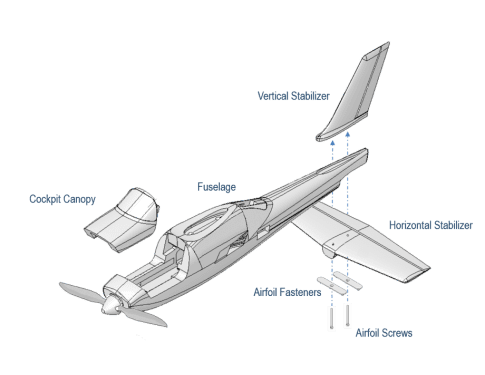
- {PIC} Retirez le stabilisateur vertical et le stabilisateur horizontal de la valise de transport.
- {PIC} Serrez d'abord les vis à la main puis, à l'aide d'un tournevis à tête plate, fixez les deux stabilisateurs au fuselage du drone. Ne serrez pas trop les vis.
-
{PIC} Confirmez que le stabilisateur horizontal et le stabilisateur vertical sont solidement fixés au fuselage :
- Lors du déplacement du stabilisateur horizontal d'avant en arrière, le jeu doit être faible, voire absent. Ajustez la tension de la vis si nécessaire par demi-tours.
- Aucun espace ne doit être présent entre la partie inférieure du stabilisateur horizontal et le fuselage du drone.
- {PIC} Branchez les connecteurs électriques du stabilisateur horizontal et du stabilisateur vertical au fuselage.
Configuration - Montage du drone
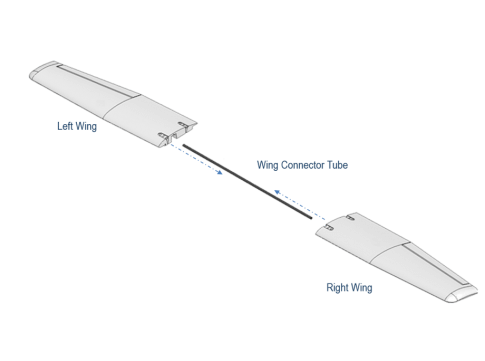
- {PIC} Retirez le tube de raccordement de l'aile droite et de l'aile gauche de l'intercalaire supérieur en mousse de la valise de transport.
- {PIC} À l'aide d'un mètre ruban, localisez le centre du tube de raccordement des ailes. Marquez le centre à l'aide d'un marqueur ou d'un petit morceau de ruban adhésif blanc.
- {PIC} Retirez l'aile droite et l'aile gauche du drone de la valise de transport.
- {PIC} Insérez le tube de raccordement des ailes dans l'une des ailes jusqu'au centre du tube. Répétez cette procédure pour l'autre aile de manière à ce que chaque moitié du tube de raccordement soit insérée dans l'aile correspondante.
Configuration - Montage du drone
- {PIC} Saisissez le drone par le bord d'attaque des deux ailes en l'alignant avec l'arrière du cockpit du drone.
- {PIC} Insérez 2 vis et fixations de la voilure dans les trous situés sur le dessus des ailes.
- {PIC} Serrez d'abord les vis à la main puis, à l'aide d'un tournevis à tête plate, fixez les deux ailes au fuselage du drone. Ne serrez pas trop les vis.
-
{PIC} Confirmez que les deux ailes sont solidement fixées au fuselage.
- Saisissez le drone par le bord d'attaque des deux ailes.
- Orientez le nez du drone vers l'utilisateur à une distance de 2 à 3 pouces puis faites rapidement tourner l'aéronef en un mouvement de va-et-vient dans la direction du lacet.
- Le jeu entre l'aile et le fuselage doit être faible, voire nul. Ajustez la tension de la vis si nécessaire par demi-tours.
-
{PIC} Branchez les connecteurs électriques des deux ailes au fuselage du drone.
- Du connecteur électrique de l'aile gauche au connecteur gauche du fuselage du drone. Du connecteur droit au connecteur droit.
Configuration - Montage du drone
- {PIC} Retirez la bande de verrouillage de sécurité du moteur placée autour des hélices puis la verrière du cockpit du drone.
- {PIC} Insérez une batterie LiPo chargée dans le cockpit du drone puis alignez ses côtés avec les marques de batterie situées à l'intérieur du cockpit du drone.
- Ne connectez pas la batterie LiPo au drone pour le moment.
- {PIC} Fixez la batterie LiPo à l'intérieur du cockpit du drone à l'aide de la sangle de batterie fournie.
- {PIC} Replacez la verrière du cockpit du drone et la bande de verrouillage de sécurité du moteur autour des hélices.

Configuration - Montage du drone
- {PIC} Après avoir assemblé le drone et installé la batterie LiPo, l'équilibrage du drone doit être contrôlé à un endroit où le vent est faible, voire nul.
-
{PIC} Pour vérifier l'équilibrage actuel du drone :
- Saisissez le drone assemblé par le bord d'attaque des ailes.
- Placez uniquement le majeur sur chacune des marques d'équilibrage situées sous les ailes puis soulevez le drone.
- Le drone doit rester parallèle au sol et présenter un léger piqué (environ 1 degré).
-
{PIC} Lors de l'équilibrage du drone, si le nez de l'aéronef pointe vers le haut (ou présente un piqué supérieur à 1 degré) :
- Retirez la bande de verrouillage de sécurité du moteur placée autour des hélices puis la verrière du cockpit du drone.
- Ajustez la position de la batterie LiPo dans le cockpit du drone. Lorsque vous avez terminé, fixez-la à nouveau.
- Replacez la verrière du cockpit du drone et la bande de verrouillage de sécurité du moteur autour des hélices.
- Vérifiez à nouveau l'équilibrage du drone.

Configuration - Vérifications avant vol du drone (configuration RTK de la base interne)
- Pour de plus amples informations concernant la liste de contrôle avant vol du drone, consultez la section 4.2.4 du manuel d'utilisation MAVinci.
- {VO/FA} Démontez l'antenne GNSS et son câble de la valise de transport MAVinci (ou de leur dispositif de stockage).
- {VO/FA} À l'aide d'un trépied pourvu d'une embase à vis calantes ou d'un trépied à hauteur fixe, mettez en place l'antenne GNSS sur la position de base.
- {VO/FA} À l'aide d'un mètre ruban, mesurez la hauteur verticale de l'antenne (non inclinée) par rapport à l'ARP de l'antenne GNSS.
- {VO/FA} Retirez le connecteur WLAN de la valise de transport avec une batterie LiPo entièrement chargée.
- {VO/FA} Connectez le câble coaxial de l'antenne GNSS à l'antenne GNSS et au connecteur WLAN.
- {VO/FA} Fixez le connecteur WLAN à un endroit où son antenne sans fil dispose d'une vue dégagée du ciel.
- {VO/FA} Fixez la batterie LiPo puis connectez-la au connecteur WLAN et à l'alimentation.
-
{VO/FA} Vérifiez les points suivants sur le connecteur WLAN :
- Le voyant d'alimentation est allumé.
- Le voyant GPS indique que le connecteur WLAN suit les satellites GNSS.
- Le voyant d'état se met à clignoter rapidement environ 30 secondes après la mise sous tension.
- {VO/FA} Sur l'ordinateur de l'utilisateur, recherchez le connecteur MAVinci en tant que connexion sans fil disponible. Une fois qu'il est détecté, connectez-vous au connecteur WLAN via Wi-Fi. Remarque : Le mot de passe sans fil des connecteurs MAVinci est mavinciconnector.
- {VO/FA} Ouvrez MAVinci Desktop. Créez/ouvrez une session, puis sélectionnez Start without connection to UAV (Démarrer sans connexion au drone).
- {VO/FA} Dans le volet Session de MAVinci Desktop, sélectionnez Internal Base Station (Station de base interne).
- {VO/FA} Configurez si nécessaire les paramètres de la station de base puis sélectionnez Start Internal Base Station (Démarrer la station de base interne).
- {VO/FA} Vérifiez que l'icône de station de base interne figure sur la vue Map.
-
{VO/FA} Si nécessaire, à l'aide d'un système de levé GNSS, établissez la position de toutes les cibles aériennes GCP dans la zone du projet destinées à des fins de QA/QC suite au post-traitement des données collectées par le drone.
- Le système de coordonnées des cibles aériennes GCP doit correspondre aux coordonnées WGS84 ou au système de coordonnées utilisé avec MAVinci Desktop.
Configuration - Vérifications avant vol du drone
- {PIC} Retirez la bande de verrouillage de sécurité du moteur placée autour des hélices puis la verrière du cockpit du drone.
- {PIC} Connectez la batterie LiPo au drone.
- Remarque : Si l'utilisateur doit effectuer un atterrissage dans une zone précise, mettez le drone sous tension à l'endroit où il devra atterrir.
- {PIC} Replacez la verrière du cockpit du drone et la bande de sécurité du moteur autour des hélices.
-
{PIC} Confirmez les informations suivantes après avoir connecté la batterie du drone :
- Le drone se met correctement sous tension.
- Les servocommandes des ailerons, du stabilisateur horizontal et du stabilisateur vertical sont activées (et le restent).
- L'affichage de bord du fuselage indique un niveau de batterie égal à 100 %.
- Les satellites GNSS commencent à suivre la trajectoire du drone en fonction de l'affichage de bord.
- Les voyants de l'aile gauche et de l'aile droite se mettent à clignoter.
- {PIC} Retirez la radiocommande de la valise de transport et confirmez les points suivants :
- L'interrupteur à bascule jaune est sur Automatic.
- L'interrupteur à bascule rouge est sur Manual.
- La manette des gaz de droite est entièrement abaissée.
- {PIC} Mettez la radiocommande sous tension. Sur le drone, confirmez que les servocommandes des ailerons, du stabilisateur horizontal et du stabilisateur vertical s'arrêtent, ce qui indique que la connexion a été établie avec la radiocommande.
- {PIC} Confirmez la valeur de tension de la radiocommande : de 7,4 V à 8,4 V.
- {VO/FA} Connectez-vous au drone dans la session MAVinci Desktop.
-
{VO/FA} Confirmez les informations suivantes concernant l'état du drone sur la vue Map dans MAVinci Desktop :
- Niveau de batterie du drone : 100 %
- Niveau de la batterie du connecteur : 100 %
- Les satellites GPS et GLONASS sont suivis. Qualité de la solution GNSS : RTK Fixed
- L'icône du drone s'affiche sur la vue Map du Bureau MAVinci.
- Boussole : Ok
- Le graphique de l'altimètre situé sous le volet de session doit être mis à jour en temps réel.
- {VO/FA} Dans le volet Camera Settings (Paramètres de la caméra) situé sous le menu Welcome de MAVinci Desktop, confirmez que le modèle de caméra sélectionné correspond à la caméra installée sur le drone et qu'elle a été configurée comme caméra par défaut.
- {VO/FA} Créez/chargez un nouveau plan de vol pour la zone d'intérêt (ZI) à collecter dans MAVinci Desktop.
- {VO/FA} Ajustez les paramètres du plan de vol si nécessaire (position de départ, niveau de GSD, relief, direction du vent, etc.).
Configuration - Vérifications avant vol du drone
- {VO/FA} Pour la méthode d'atterrissage en mode de descente assistée par défaut, il n'est pas nécessaire de modifier les paramètres par défaut du plan de vol par rapport à ceux du mode Landing Point.
-
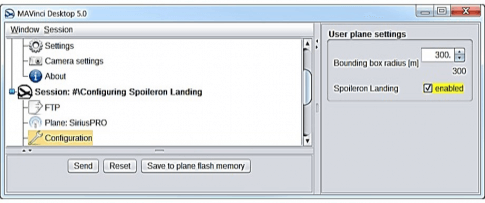
{VO/FA} En cas d'atterrissage assisté avec spoileron :
- Sélectionnez Configuration dans le volet Session.
- Cochez la case Spoileron Landing.
- Sélectionnez Send (Envoyer) pour transmettre la configuration actuelle au drone (actif uniquement jusqu'à ce que le drone soit mis hors tension).
- Si vous le souhaitez, sélectionnez Save to plane flash memory (Enregistrer dans la mémoire flash de l'aéronef) pour définir le mode d'atterrissage avec spoileron comme mode par défaut.
Configuration - Vérifications avant vol du drone
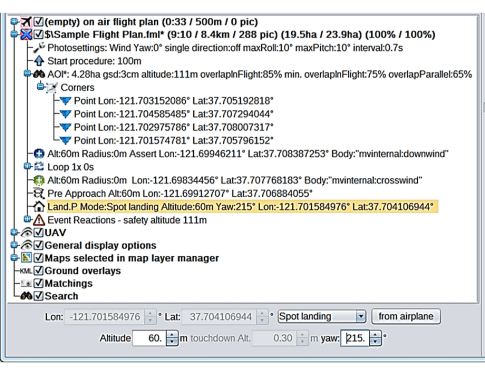
- {VO/FA} Si vous effectuez un atterrissage dans une zone précise :
- Sélectionnez les paramètres Land P Mode dans le plan de vol.
- Sélectionnez Spot Landing dans le menu déroulant.
-
Après avoir sélectionné Spot Landing, une fenêtre s'affiche. Calculez la moyenne de la position actuelle du drone pour déterminer l'approche d'atterrissage dans une zone précise. Confirmez les informations suivantes puis sélectionnez Ok :
- Le drone fonctionne en mode RTK Fixed.
- Le drone se situe sur le point d'atterrissage en l'absence d'obstacle et de relief accidenté dans un rayon de 20 m.
- Le nez du drone est orienté face au vent.
- Après avoir calculé la moyenne de la position du drone, MAVinci Desktop détermine automatiquement l'approche d'atterrissage dans une zone précise et ajuste les métriques du plan de vol.
-
{VO/FA} Ajustez si nécessaire les paramètres d'atterrissage dans une zone précise suivants de manière à ce que le drone évite les obstacles situés sur la trajectoire d'atterrissage :
- L'angle de lacet (direction) de l'approche.
- L'altitude AGL avant de procéder à l'atterrissage dans une zone précise au cours de l'approche (minimum : 50 m).
- Lorsqu'une altitude de 50 m est utilisée, tous les obstacles doivent se situer à au moins 5 m à gauche et à droite de la trajectoire d'atterrissage et présenter une hauteur maximale de 5 m sur la trajectoire.
Configuration - Vérifications avant vol du drone
- {PIC} Ouvrez le compartiment de la caméra du drone et confirmez que la carte SD y a été insérée. Lorsque vous avez terminé, fermez le compartiment de la caméra.
- {PIC} En dessous du drone, dans l'enceinte de la caméra, centrez l'objectif de la caméra du drone.
- {PIC} Retirez le cache de l'objectif de la caméra.
- {PIC} Confirmez que l'écran d'affichage du drone indique Send Flight plan.
- {VO/FA} Transmettez le plan de vol au drone. La fenêtre Check Wing Connection (Vérifier la connexion des ailes) s'affiche.
- {PIC} Placez l'interrupteur rouge de la radiocommande en position Autopilot (Pilote automatique). Appuyez sur l'interrupteur d'atterrissage. Confirmez que les deux ailerons des ailes se déploient vers le haut. Lorsque vous avez terminé, replacez l'interrupteur rouge de la radiocommande en mode Manual.
- {VO/FA} Sélectionnez OK dans la fenêtre Check Wing Connection (Vérifiez la connexion des ailes) pour transmettre le plan de vol. Confirmez que le plan de vol a été transmis au drone.
- {PIC} Confirmez que l'écran d'affichage du drone indique Click Flight (Cliquez sur le vol).
- {PIC} Effectuez la vérification du déclenchement et de la temporisation de la caméra du drone. Inclinez le drone de 60 degrés et confirmez que les images peuvent être capturées et enregistrées sur la carte SD de la caméra en indiquant l'heure UTC correspondante.
- {PIC} Effectuez la vérification de la surface de contrôle du drone à l'aide de la radiocommande en mode entièrement manuel.
- {PIC} Effectuez la vérification de la boussole du drone :
- Saisissez et orientez successivement le nez du drone vers les quatre points cardinaux (N, S, E et O).
- Confirmez que l'icône du drone affichée dans MAVinci Desktop correspond à la direction actuelle du drone.
-
{PIC} Effectuez la vérification des stabilisateurs. Confirmez que les deux stabilisateurs sont solidement fixés au fuselage.
- Lors du déplacement du stabilisateur horizontal d'avant en arrière lorsque le drone repose sur la chaussure de l'utilisateur, confirmez que le jeu est faible, voire absent. Ajustez les vis de la voilure par demi-tour en fonction des besoins jusqu'à les avoir suffisamment serrées.
- Confirmez qu'aucun espace n'est présent entre la partie inférieure du stabilisateur horizontal et le fuselage du drone.
-
{PIC} Effectuez la vérification des ailes. Confirmez que les deux ailes sont solidement fixées au fuselage.
- Saisissez le drone par le bord d'attaque des deux ailes.
- Orientez le nez du drone vers l'utilisateur à une distance de 2 à 3 pouces puis faites rapidement tourner l'aéronef en un mouvement de va-et-vient dans la direction du lacet.
- Confirmez que jeu entre l'aile et le fuselage est faible, voire nul. Ajustez les vis de la voilure par demi-tour en fonction des besoins jusqu'à les avoir suffisamment serrées.
-
{PIC} Exécutez le contrôle de l'équilibrage du drone. Pour vérifier l'équilibrage actuel du drone :
- Saisissez le drone assemblé par le bord d'attaque des ailes.
- Placez uniquement le majeur sur chacune des marques d'équilibrage situées sous les ailes puis soulevez le drone.
- Le drone doit rester parallèle au sol et présenter un léger piqué (environ 1 degré).
- Si nécessaire, ajustez la position de la batterie LiPo dans le cockpit du drone. Lorsque vous avez terminé, fixez-la à nouveau.
-
{PIC} Procédez à l'inspection avant vol de l'aéronef.
- Confirmez s'il existe des dommages visibles sur le fuselage, les deux ailes, le stabilisateur horizontal ou le stabilisateur vertical du drone susceptibles de nuire aux opérations de vol.
- Confirmez que les connecteurs électriques du stabilisateur horizontal, du stabilisateur vertical et des deux ailes sont bien branchés.
- Inspectez les hélices du drone pour déceler des fissures ou des dommages éventuels. Remplacez-les si nécessaire.
- Confirmez que les hélices du drone sont correctement fixées au moteur. Vous devez rencontrer une certaine résistance lors du déploiement et du repli des hélices.
-
{PIC} Procédez à l'inspection avant vol de l'aéronef (suite).
- Confirmez que le moteur du drone tourne librement dans les deux sens et qu'il n'émet pas de bruit de broyage dû à la présence de saleté ou de débris.
- Confirmez que la batterie du drone est correctement fixée dans le cockpit.
- Inspectez le squelette en plastique interne situé dans le cockpit. Confirmez l'absence de fissures et de dommages.
- Confirmez que la verrière du cockpit du drone est correctement fixée.
- Confirmez que l'objectif de la caméra du drone est correctement centré dans l'enceinte de la caméra située en dessous du drone.
- Confirmez que le cache de l'objectif de la caméra du drone a été retiré.
- Confirmez que l'enceinte de la caméra du drone a été correctement fixée.
- Confirmez que l'antenne GNSS a été correctement fixée.
- Confirmez que les orifices de refroidissement situés de chaque côté du fuselage du drone sont exempts de saleté et de débris.
- Vérifications avant vol terminées.