Initiation : Principaux acronymes
UAS (Unmanned Aircraft System) : Système d'aéronef sans pilote
UAV (Unmanned Aerial Vehicle) : Drone
AGL (Above Ground Level) : Au-dessus du sol
LiPo : Lithium-polymère
VLOS (Visual Line of Sight) : Ligne de visée
RC (Remote Control) : Radiocommande
AOI (Area of Interest) : Zone d'intérêt (ZI)
GSD (Ground Sample Distance) : Résolution au sol
GPS (Global Positioning System) : Système de positionnement universel
GNSS (Global Navigation Satellite System) : Système international de navigation par satellite
RTK (Real Time Kinematic) : Cinématique en temps réel
GCP (Ground Control Point) : Point de contrôle au sol
PIC (Pilot in Command) : Commandant de bord
VO (Visual Observer) : Observateur visuel
FA (Flight Assistant) : Assistant de vol
ATC (Air Traffic Control) : Contrôle du trafic aérien
VFR (Visual Flight Rules) : Règles de vol à vue
AP (Autopilot) : Pilote automatique
LZ (Landing Zone) : Zone d'atterrissage
ARP (Antenna Reference Point) : Point de référence d'antenne
IMU (Inertial Measurement Unit) : Centrale à inertie
WLAN (Wireless Local Area Network) : Réseau local sans fil
Composants du drone Sirius PRO
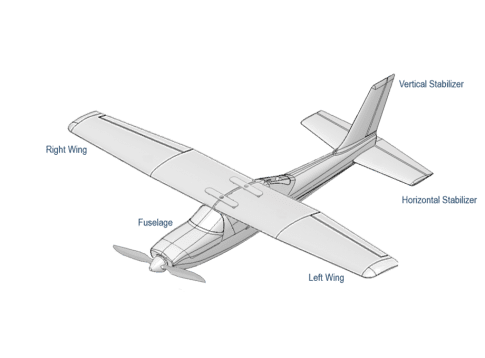
Fuselage du drone – se compose des éléments suivants :
Caméra de drone
Moteur du drone / Contrôleur de vitesse du moteur / Hélices
Récepteur/Antenne GNSS
IMU et baromètre
Récepteur de la radiocommande
Pilote automatique SIRIUS
Stabilisateur vertical : contrôle la direction de l'aéronef.
Stabilisateur horizontal : contrôle l'altitude de l'aéronef.
Ailes gauche/droite : permet à l'aéronef de tourner.
Composants du drone Sirius PRO
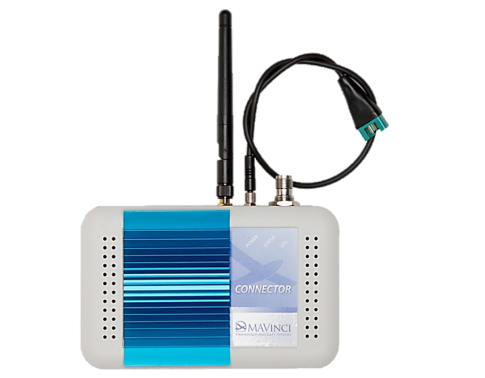
- Connecteur WLAN MAVinci
- Communique avec le drone via une liaison 2,4GHz.
- Transmet les corrections RTK GNSSS au drone.
-
Connecte l'ordinateur de l'utilisateur en Wi-Fi pour fournir à l'utilisateur les informations d'état du drone pendant le vol, notamment :
- Pourcentage de charge de la batterie du drone et du connecteur WLAN
- Altitude et vitesse au sol actuelles
- États GNSS
- Pourcentage d'achèvement de la mission
- État de connexion de la radiocommande
Composants du drone Sirius PRO
-
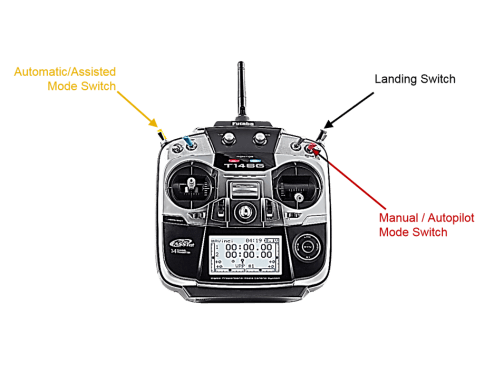
Émetteur de la radiocommande
-
Permet à l'utilisateur de mettre le drone dans l'un des 3 modes de vol du SIRIUS :
- Automatic : Le drone ne répond pas à la radiocommande et vole selon le plan de vol transmis.
- Autopilot Assisted (Assistance pilote automatique) : La commande des gaz est bloquée, l'utilisateur contrôle haut/bas/gauche/droite Le drone ne réagit pas à la radiocommande aussi directement qu'en mode manuel intégral.
- Full Manual (Manuel intégral) : Toutes les fonctions de la radiocommande sont disponibles.
- Permet à l'utilisateur de couper le moteur du drone (sous 20 m AGL) avec le commutateur d'atterrissage.
-
Permet à l'utilisateur de mettre le drone dans l'un des 3 modes de vol du SIRIUS :
Composants du drone Sirius PRO
-
Émetteur de la radiocommande
- Mode Automatic Flight (Vol automatique)

Composants du drone Sirius PRO
-
Émetteur de la radiocommande
- Mode Full Manual

Composants du drone Sirius PRO
-
Options de charge utile de la caméra
-
Charge utile RGB standard
- La charge utile par défaut de la caméra du drone SIRIUS intègre une caméra Fujifilm X-M1 16,0 MP.
- L'objectif utilisé pour le Fujifilm X-M1 est un objectif XF-18 mm f/2.0 R avec focale fixe.
- La GSD minimale (taille du pixel) du SIRIUS PRO pouvant être obtenue avec cette charge utile est 1,6 cm.
-
Charge utile RGB standard

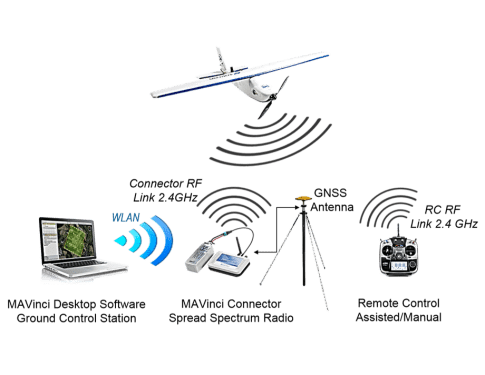
Récapitulatif des communications SIRIUS PRO
-
Base interne RTK SIRIUS PRO
- L'ordinateur de l'utilisateur communique sur le WLAN du connecteur MAVinci via le logiciel MAVinci Desktop.
- Le connecteur MAVinci communique avec l'ordinateur de l'utilisateur sur le WLAN et avec le drone via une liaison 2,4GHz.
- L'antenne GNSS est reliée au connecteur MAVinci pour fournir la position de la base RTK. Le connecteur MAVinci envoie les corrections RTK au drone via une liaison 2,4GHz.
- La radiocommande communique avec le drone via une liaison 2,4GHz indépendante du connecteur MAVinci.
Modes d'atterrissage
-
Trois méthodes d'atterrissage différentes sont disponibles pour le drone SIRIUS PRO :
-
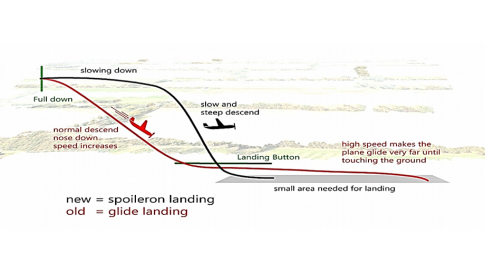
Atterrissage en vol plané assisté
- Méthode d'atterrissage par défaut du SIRIUS.
- Pendant les opérations aériennes, le commandant de bord utilise la radiocommande pour faire atterrir le drone une fois sa mission achevée.
- En atterrissage en vol plané assisté, l'aéronef descend progressivement, mais à une vitesse supérieure.
- Requiert une piste d'atterrissage plus longue une fois que le moteur de l'aéronef est mis hors tension pendant l'atterrissage.
-
Atterrissage en vol plané assisté
-
Trois méthodes d'atterrissage différentes sont disponibles pour le drone SIRIUS PRO :
-
Atterrissage avec spoileron
- Pendant les opérations aériennes, le commandant de bord utilise la radiocommande pour faire atterrir le drone une fois sa mission achevée.
- Une fois l'avion sous les 20 m AGL, les spoilerons sont activés, ce qui ralentit l'avion.
- En atterrissage avec spoileron (déporteur), l'aéronef descend brutalement, mais à une vitesse ralentie.
- Nécessite une piste d'atterrissage plus courte une fois que le moteur de l'aéronef est mis hors tension pendant l'atterrissage.
-
Atterrissage avec spoileron
-
Trois méthodes d'atterrissage différentes sont disponibles pour le drone SIRIUS PRO :
-
Atterrissage dans une zone précise
- Méthode d'atterrissage automatique sur un point d'atterrissage indiqué.
- Le logiciel MAVinci Desktop détermine automatiquement l'approche vers le point d'atterrissage.
- Lors de l'atterrissage dans une zone précise, l'aéronef descend brutalement, mais à une vitesse ralentie.
- Nécessite la fonction RTK GNSS pour fonctionner.
-
Atterrissage dans une zone précise