Getting Acquainted: Key Acronyms
UAS – Unmanned Aircraft System
UAV – Unmanned Aerial Vehicle
AGL – Above Ground Level
LiPo – Lithium Polymer
VLOS – Visual Line of Sight
RC – Remote Control
AOI – Area of Interest
GSD – Ground Sample Distance
GPS – Global Positioning System
GNSS – Global Navigation Satellite System
RTK – Real Time Kinematic
GCP – Ground Control Point
PIC – Pilot in Command
VO – Visual Observer
FA – Flight Assistant
ATC – Air Traffic Control
VFR – Visual Flight Rules
AP – Autopilot
LZ – Landing Zone
ARP – Antenna Reference Point
IMU – Inertial Measurement Unit
WLAN – Wireless Local Area Network
Sirius PRO UAS Components
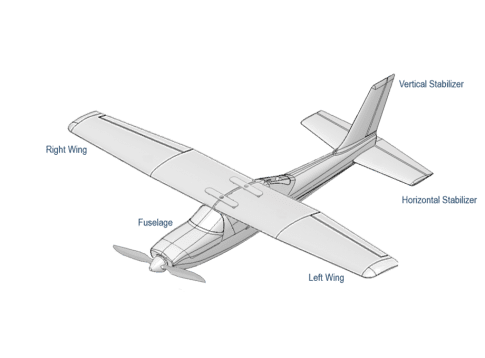
UAV Fuselage – contains the following items:
UAV camera
UAV Engine/Engine Speed Controller/Propellers
GNSS Receiver/Antenna
IMU and Barometer
RC Receiver
SIRIUS Autopilot
Vertical Stabilizer – controls aircraft heading.
Horizontal Stabilizer – controls aircraft altitude.
Left/Right Wings – allows the aircraft to turn.
SIRIUS PRO UAS Components
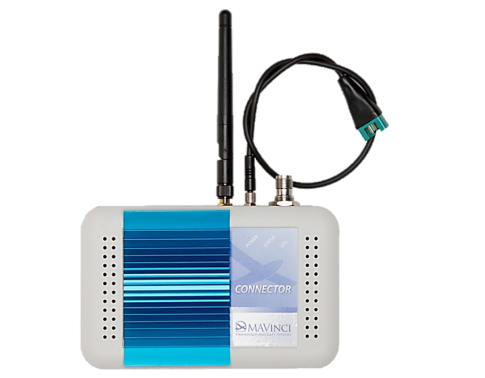
- WLAN MAVinci Connector
- Communicates with the UAV via a 2.4 GHz link.
- Streams GNSS RTK Corrections to the UAV.
-
Connects to the user’s PC via Wi-Fi to provide real-time UAV status information during flight to the user, including:
- UAV and WLAN Connector battery percentage
- Current Altitude and ground speed
- GNSS Status
- Percentage of Mission Completion
- RC connection status
Sirius PRO UAS Components
-
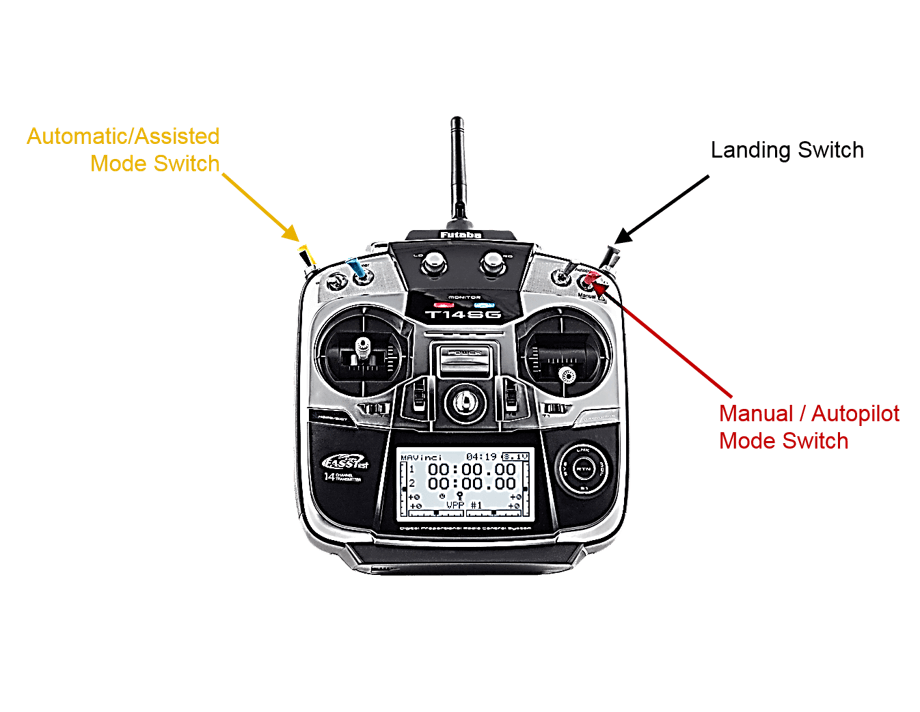
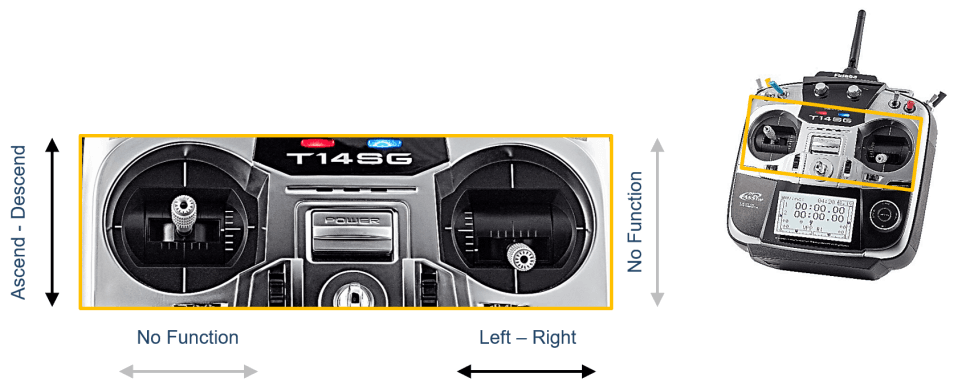
RC Transmitter
-
Allows the user to place the UAV into any of the 3 flight modes available to the SIRIUS:
- Automatic - UAV does not react to the RC and flies according to the transmitted flight plan.
- Autopilot Assisted – Throttle is locked, user controls up/down/left/right. UAV does not react to the RC as sensitively as in full manual mode.
- Full Manual – All RC functions are available.
- Allows the user to turn off the UAV engine (when under 20m AGL) using the Landing Switch.
-
Allows the user to place the UAV into any of the 3 flight modes available to the SIRIUS:
SIRIUS PRO UAS Components
-
RC Transmitter
- Automatic Flight Mode
SIRIUS PRO UAS Components
-
RC Transmitter
- Full Manual Mode

SIRIUS PRO UAS Components
-
Camera Payload Options
-
Standard RGB Payload
- The default camera payload for the SIRIUS UAS incorporates a Fujifilm X-M1 16.0 MP camera.
- The lensing used for the Fujifilm X-M1 is an XF-18mm f/2.0 R lens with a fixed focal length.
- The minimum GSD (pixel size) for the SIRIUS PRO that can be achieved with this payload is 1.6 cm.
-
Standard RGB Payload

SIRIUS PRO Communication Summary
-
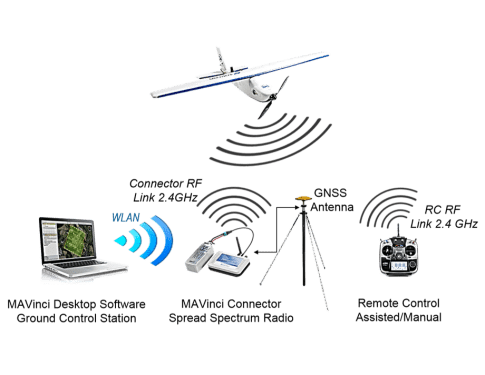
SIRIUS PRO Internal Base RTK
- The user’s PC communicates over WLAN to the MAVinci connector in the MAVinci Desktop software.
- The MAVinci connector communicates both to the user’s PC over WLAN and to the UAV via a 2.4 GHz Link.
- The GNSS Antenna is connected to the MAVinci Connector to provide the RTK Base position. The MAVinci connector streams RTK corrections to the UAV via the 2.4 GHz Link.
- The RC controller communicates to the UAV via a 2.4 GHz link independent of the MAVinci connector.
Landing Modes
-
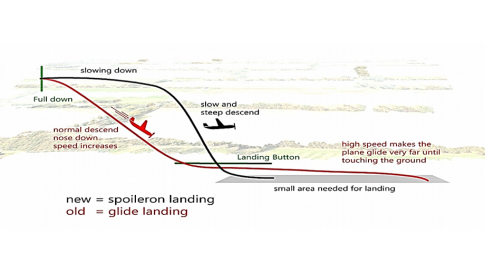
There are 3x different landing methods available to the SIRIUS PRO UAS:
-
Assisted glide landing
- Default landing method for the SIRIUS UAS.
- During flight operations, the PIC uses the RC controller to land the UAV after it completes its mission.
- In assisted glide landing, the aircraft descends gradually but at a higher velocity.
- Requires a longer gliding path once the aircraft engine is switched off during landing.
-
Assisted glide landing
-
There are 3x different landing methods available to the SIRIUS PRO UAS:
-
Spoileron Landing
- During flight operations, the PIC uses the RC controller to land the UAV after it completes its mission.
- Once the aircraft is below 20m AGL, the spoilerons are enabled, slowing the aircraft.
- During spoileron landing, the aircraft descends steeply but at a slower velocity.
- Requires a shorter gliding path once the aircraft engine is switched off during landing.
-
Spoileron Landing
-
There are 3x different landing methods available to the SIRIUS PRO UAS:
-
Spot Landing
- Automatic Landing method to a specified landing spot.
- The approach to the landing spot is determined automatically by MAVinci Desktop software.
- During spot landing, the aircraft descends steeply but at a slower velocity.
- Requires RTK GNSS functionality to operate.
-
Spot Landing