Configuración - Montaje del UAV
- Para obtener más información sobre el montaje de la aeronave, consulte la lista de verificación de montaje del UAV en la sección 4.2.2 del manual del usuario de MAVinci.
- {PIC} Retire el fuselaje del UAV del estuche de transporte y retire la manga de plástico.
- {PIC} Retire la manga de plástico que se encuentra alrededor del fuselaje.
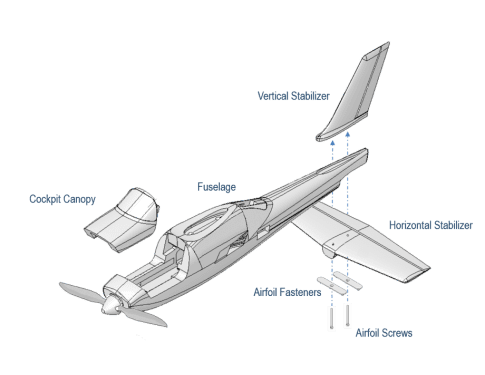
- {PIC} Prepare cuatro tornillos y sujetadores de la superficie aerodinámica y un destornillador de punta plana.
- {PIC} Retire el estabilizador vertical y horizontal del estuche de transporte.
- {PIC} En primer lugar, apriete a mano los tornillos, luego con el destornillador de punta plana, fije ambos estabilizadores al fuselaje del UAV. No ajuste demasiado los tornillos.
- {PIC} Confirme que los estabilizadores horizontales y verticales estén firmemente sujetados y fijados al fuselaje:
- Debe haber poco o nada de movimiento al mover el estabilizador horizontal hacia adelante y hacia atrás. Ajuste la tensión del tornillo, según sea necesario, con media vuelta.
- No debería haber ningún espacio entre la parte inferior del estabilizador horizontal y el fuselaje del UAV.
- {PIC} Conecte los conectores eléctricos para los estabilizadores horizontales y verticales al fuselaje.
Configuración - Montaje del UAV
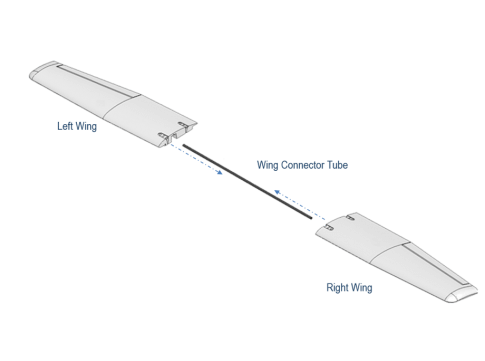
- {PIC} Retire el tubo conector de las alas izquierda y derecha de la plantilla de espuma superior del estuche de transporte.
- {PIC} Con una cinta métrica, ubique el centro del tubo conector del ala. Marque el centro con un marcador o un trozo pequeño de cinta adhesiva blanca.
- {PIC} Retire las alas izquierda y derecha del UAV del estuche de transporte.
- {PIC} Inserte el tubo conector del ala en cualquiera de las alas hasta alcanzar el centro del tubo. Repita este proceso para el ala restante, de modo que la mitad del tubo conector del ala se inserte en ambas alas.
Configuración - Montaje del UAV
- {PIC} Coloque el borde delantero de ambas alas alineado con la parte posterior de la cabina del UAV.
- {PIC} Inserte 2 tornillos y sujetadores de superficie aerodinámica a través de los orificios ubicados en la parte superior de las alas.
- {PIC} Primero, apriete a mano los tornillos y luego use el destornillador de punta plana para fijar ambas alas al fuselaje del UAV. No ajuste demasiado los tornillos.
- {PIC} Confirme que ambas alas estén firmemente sujetadas y aseguradas al fuselaje.
- Recoja el UAV por el borde delantero de ambas alas.
- Con la nariz del UAV frente al usuario y a 2 o 3 pulgadas de distancia, gire rápidamente el avión hacia adelante y hacia atrás en la dirección de la guiñada.
- Debe haber poco o nada de movimiento entre el ala y el montaje del fuselaje. Ajuste la tensión del tornillo, según sea necesario, con media vuelta.
- {PIC} Conecte los conectores eléctricos para ambas alas al fuselaje del UAV.
- Conector eléctrico del ala izquierda al conector izquierdo en el fuselaje del UAV. Derecho con derecho.
Configuración - Montaje del UAV
- {PIC} Retire la banda de bloqueo de seguridad del motor alrededor de las hélices y retire el techo de la cabina del UAV.
- {PIC} Inserte una batería LiPo cargada en la cabina del UAV y alinee los bordes de la batería con las marcas de batería ubicadas dentro de la cabina del UAV.
- No conecte la batería LiPo al UAV en este momento.
- {PIC} Fije la batería LiPo dentro de la cabina del UAV con la correa de batería provista.
- {PIC} Reemplace el techo de la cabina del UAV y reemplace la banda de bloqueo de seguridad del motor alrededor de las hélices.

Configuración - Montaje del UAV
- {PIC} Después de montar el UAV e instalar la batería LiPo, se debe verificar el equilibrio del UAV en una zona con poco o nada de viento.
- {PIC} Para verificar el equilibrio del UAV actual:
- Recoja el UAV ensamblado por los bordes delanteros de las alas.
- Coloque solo su dedo medio en cada una de las marcas de equilibrio ubicadas en la parte inferior de las alas y sostenga el UAV.
- El UAV debe parecer equilibrado con el suelo con una leve inclinación de la nariz (aproximadamente 1 grado) hacia abajo.
- {PIC} Si al equilibrar el UAV, la aeronave aparece con la nariz hacia arriba (o con la nariz hacia abajo en más de 1 grado):
- Quite la banda de seguridad del motor ubicada alrededor de las hélices y extraiga el techo de la cabina del UAV.
- Ajuste la posición de la batería de polímero de litio del interior de la cabina del UAV. Fije la batería LiPo nuevamente una vez completada la carga.
- Reemplace el techo de la cabina del UAV y reemplace la banda de bloqueo de seguridad del motor alrededor de las hélices.
- Verifique el equilibrio del UAV nuevamente.

Configuración - Controles de UAS previos al vuelo (configuración de RTK de la base interna)
- Para obtener más información sobre la lista de verificación previa al vuelo del UAS, consulte la sección 4.2.4 del manual del usuario de MAVinci.
- {VO/FA}Retire la antena de GNSS y el cable de la antena de GNSS del estuche de transporte de MAVinci (o donde se almacenen estos elementos).
- {VO/FA} Con un trípode con base nivelante o un trípode de altura fija, coloque la antena de GNSS sobre la posición de base.
- {VO/FA} Con una cinta métrica, mida la altura de la antena vertical (no inclinada) hasta el ARP (punto de referencia de la antena) de la antena de GNSS.
- {VO/FA} Retire el conector de WLAN del estuche de transporte junto con una batería LiPo completamente cargada.
- {VO/FA} Conecte el cable coaxial de la antena de GNSS tanto a la antena de GNSS como al conector de WLAN.
- {VO/FA} Fije el conector de WLAN en una ubicación donde la antena inalámbrica localizada en el conector tenga una vista clara y sin obstrucciones del cielo.
- {VO/FA} Fije la batería de polímero de litio como corresponde y conéctela al conector de WLAN para suministrar energía.
- {VO/FA} Confirme lo siguiente en el conector de WLAN:
- El LED de encendido está prendido.
- El LED del GPS indica que el conector de WLAN está rastreando satélites de GNSS.
- El LED de estado comienza a parpadear rápidamente después de aproximadamente 30 segundos de haber encendido la unidad.
- {VO/FA} En el ordenador del usuario, busque el conector de MAVinci como una conexión inalámbrica disponible y una vez descubierto, conéctese al conector de WLAN a través de wifi. Nota: La contraseña inalámbrica de cualquier conector MAVinci es "mavinciconnector"
- {VO/FA} Abra MAVinci Desktop. Cree/abra una sesión y seleccioneStart without connection to UAV (Comenzar sin conexión a UAV).
- {VO/FA} En el panel de Session (Sesión) en MAVinci Desktop, seleccione Internal Base Station (Estación base interna).
- {VO/FA} Configure los ajustes de la estación base según sea necesario y seleccione Start Internal Base Station (Iniciar estación base interna).
- {VO/FA} Confirme que el icono de la estación base interna aparezca en la vista de mapa.
- {VO/FA} En caso de ser necesario, con un sistema GNSS de cálculo, defina y establezca la posición en todos los blancos aéreos de puntos de control terrestre (GCP) en el área del proyecto que se usarán para el aseguramiento de calidad/control de calidad después del post-proceso de los datos capturados de un sistema aéreo no tripulado (UAS).
- El sistema de coordenadas para los objetivos aéreos de GCP debe estar en las coordenadas de WGS84 o en cualquier sistema de coordenadas que se use con MAVinci Desktop.
Configuración - Controles de UAS previos al vuelo
- {PIC} Retire la banda de bloqueo de seguridad del motor que se encuentra alrededor de las hélices y retire el techo de la cabina del UAV.
- {PIC} Conecte la batería LiPo al UAV.
- Nota: Si el usuario realizará un aterrizaje de precisión, encienda el UAV en la ubicación donde aterrizará este.
- {PIC} Vuelva a colocar el techo de la cabina del UAV y la banda de seguridad del motor alrededor de las hélices.
- {PIC} Confirme lo siguiente una vez que se haya conectado la batería del UAV:
- El UAV se enciende con éxito.
- Los servos del estabilizador horizontal y vertical y de los alerones se encienden (y permanecen encendidos).
- El nivel de la batería del UAV a través de la pantalla integrada del fuselaje exhibe un 100 %.
- Los satélites de GNSS comienzan a rastrear conforme a la pantalla integrada del UAV.
- Los LED de las alas izquierda y derecha comienzan a parpadear.
- {PIC} Retire el controlador del RC del estuche de transporte y confirme lo siguiente:
- El conmutador amarillo está configurado en Automatic (Automático).
- El conmutador rojo está configurado en Manual.
- La palanca del acelerador que se encuentra a la derecha está completamente hacia abajo.
- {PIC} Encienda el controlador del RC. Confirme en el UAV que los servos de los alerones y los estabilizadores horizontal y vertical se apaguen, lo que indica que se establece la conexión con el controlador del RC.
- {PIC} Confirme el nivel de voltaje del controlador del RC: 7,4 V - 8,4 V.
- {VO/FA} Conéctese al UAV en la sesión de MAVinci Desktop.
- {VO/FA} Confirme la siguiente información de estado de UAS en la vista de mapa de MAVinci Desktop:
- Nivel de batería del UAV: 100 %
- Nivel de batería del conector: 100 %
- Los satélites GPS y GLONASS se están rastreando. Calidad de solución de GNSS: RTK corregida
- El icono de UAV se muestra en la vista de mapa en MAVinci Desktop.
- Brújula: Correcta
- El gráfico del altímetro debajo del panel de sesión debe actualizarse en tiempo real.
- {VO/FA} En el panel de Configuración de la cámara, en el menú de Welcome (Página principal) en MAVinci Desktop, confirme que el modelo de cámara seleccionado sea la cámara instalada en el UAV y esté configurada como opción predeterminada.
- {VO/FA} Cree/cargue un nuevo plan de vuelo para que se capture la AOI en MAVinci Desktop.
- {VO/FA} Ajuste la configuración del plan de vuelo según sea necesario (es decir, posición inicial, nivel de GSD, para terreno, dirección del viento, etc.).
Configuración - Controles de UAS previos al vuelo
- {VO/FA} Para el método de aterrizaje predeterminado de deslizamiento en modo asistido, no se exigen cambios en la configuración predeterminada del modo de punto de aterrizaje en el plan de vuelo.
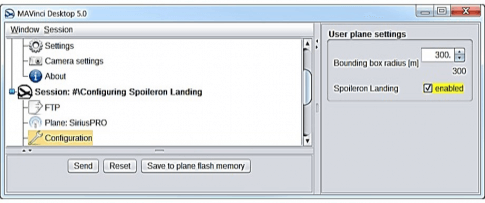
- {VO/FA} Si se realiza un aterrizaje con alerón deflector en modo asistido:
- Seleccione Configuration (Configuración) desde el panel de Session (Sesión).
- Marque la casilla de verificación Spoileron Landing (Aterrizaje con alerón deflector).
- Seleccione Send (Enviar) para enviar la configuración actual al UAV (activa solo hasta que el UAV se apague).
- Si lo desea, seleccione Save to plane flash memory (Guardar en memoria flash del avión) para establecer el aterrizaje con alerón deflector como configuración predeterminada.
Configuración - Controles de UAS previos al vuelo
- {VO/FA} Si se realiza un aterrizaje preciso:
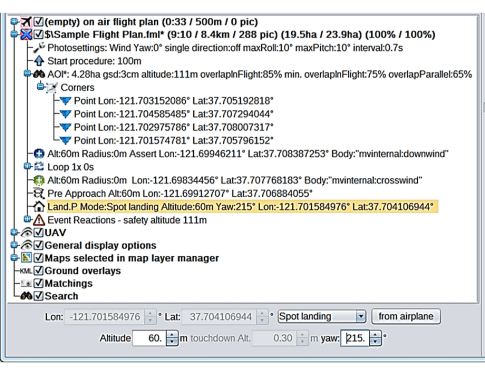
- Seleccione los ajustes de Land P Mode (Modo de aterrizaje P) en el plan de vuelo.
- Seleccione Spot Landing (Aterrizaje preciso) desde el menú desplegable.
- Después de seleccionar Spot Landing, aparecerá una ventana. La posición actual del UAV deberá calcularse para determinar el enfoque del aterrizaje de precisión. Confirme lo siguiente y luego seleccione Ok (Aceptar):
- El UAV tiene un RTK fijo.
- El UAV se encuentra sobre el lugar de aterrizaje y no hay obstáculos ni terreno irregular en un radio de 20 m.
- La nariz del UAV apunta hacia el viento.
- Después de calcular la posición aproximada del UAV, MAVinci Desktop determinará automáticamente el enfoque de aterrizaje de precisión y ajustará los criterios de medición del plan de vuelo.
- {VO/FA} Ajuste las siguientes configuraciones de aterrizaje de precisión, según sea necesario, de modo que el UAV evite cualquier obstrucción ubicada a lo largo de la pista de aterrizaje:
- El ángulo de guiñada (rumbo) del acercamiento.
- La altitud AGL (elevación sobre el nivel del suelo) antes de comenzar el aterrizaje preciso a lo largo del acercamiento (el mínimo es 50 m).
- Cuando se usa una altitud de 50 m, cualquier obstáculo debe estar como mínimo 5 m aa la izquierda y a la derecha a lo largo del camino de aterrizaje y a una altura de no más de 5 m a lo largo del camino.
Configuración - Controles de UAS previos al vuelo
- {PIC} Abra el compartimento de la cámara del UAV y confirme que la tarjeta SD esté insertada en la cámara del UAV. Una vez que haya finalizado, asegúrese de que el compartimiento de la cámara permanezca cerrado.
- {PIC} En la parte inferior del UAV, en la sección de la cámara, centre la lente de la cámara del UAV.
- {PIC} Retire la tapa de la lente de la cámara.
- {PIC} Confirme que la pantalla del UAV muestre Send Flight plan (Enviar plan de vuelo).
- {VO/FA} Transmita el plan de vuelo al UAV. Aparecerá la ventana de Check Wing Connection (Controlar conexión de ala).
- {PIC} Cambie el interruptor rojo en el controlador del RC a Autopilot (Piloto automático). Presione el interruptor de aterrizaje. Confirme que ambos alerones en las alas se desvíen hacia arriba. Una vez que haya finalizado, vuelva a colocar el interruptor rojo del RC en Manual.
- {VO/FA} Seleccione Ok (Aceptar) en la ventana de Check Wing Connection (Controlar conexión de ala) para transmitir el plan de vuelo. Confirme que el plan de vuelo se haya transmitido al UAV.
- {PIC} Confirme que la pantalla del UAV muestre Click Flight (Hacer clic en vuelo).
- {PIC} Realice el control de temporización y disparo de la cámara del UAV. Haga rodar el UAV 60 grados y confirme que las imágenes se puedan disparar, se puedan almacenar en la tarjeta SD de la cámara y que la hora de UTC esté asociada con las imágenes tomadas.
- {PIC} Realice la verificación de la superficie de control del UAV mediante el uso del controlador del RC en modo manual completo.
- {PIC} Realice el control de la brújula del UAV:
- Recoja y coloque la nariz del UAV sucesivamente en las cuatro direcciones cardinales (N, S, E, O).
- Confirme que el icono del UAV que aparece en MAVinci Desktop corresponde a la dirección actual del UAV.
- {PIC} Realice el control de los estabilizadores. Confirme que ambos estabilizadores estén firmemente sujetados y asegurados al fuselaje.
- Con la nariz del UAV colocada en el zapato del usuario, confirme que haya poco o nada de movimiento al mover el estabilizador horizontal hacia adelante y hacia atrás. Ajuste los tornillos de la superficie aerodinámica con media vuelta cada vez que sea necesario hasta que estén lo suficientemente apretados.
- Confirme que no haya ningún espacio entre la parte inferior del estabilizador horizontal y el fuselaje del UAV.
- {PIC} Realice el control de las alas. Confirme que ambas alas estén firmemente sujetadas y aseguradas al fuselaje.
- Recoja el UAV por el borde delantero de ambas alas.
- Con la nariz del UAV frente al usuario y a 2 o 3 pulgadas de distancia, gire rápidamente el avión hacia adelante y hacia atrás en la dirección de la guiñada.
- Confirme que haya poco o nada de movimiento entre el ala y el montaje del fuselaje. Ajuste los tornillos de la superficie aerodinámica con media vuelta cada vez que sea necesario hasta que estén lo suficientemente apretados.
- {PIC} Realice el control de equilibrio del UAV. Para verificar el equilibrio actual del UAV, haga lo siguiente:
- Tome el UAV armado de los bordes delanteros de las alas.
- Coloque solamente el dedo medio sobre cada una de las marcas de equilibrio ubicadas en la parte inferior de las alas y sostenga el UAV.
- El UAV debe estar nivelado con el suelo y la nariz debe estar ligeramente hacia abajo (aproximadamente 1 grado).
- Ajuste la posición de la batería de polímero de litio dentro de la cabina del UAV si es necesario. Fije la batería de polímero de litio nuevamente una vez completada la carga.
- {PIC} Realice una inspección de la aeronave previa al vuelo.
- Confirme que no haya daños evidentes en el fuselaje del UAV, en las alas ni en los estabilizadores horizontales y verticales que pudieran afectar las operaciones de vuelo.
- Confirme que los conectores eléctricos de los estabilizadores horizontales y verticales, y de ambas alas, estén firmemente enchufados.
- Inspeccione que no haya roturas ni daños en las hélices del UAV. Reemplace si es necesario.
- Confirme que las hélices del UAV estén correctamente aseguradas al motor del UAV. Debe observar cierta resistencia al extender o retraer las hélices.
- {PIC} Realice una inspección de la aeronave previa al vuelo (continuación).
- Confirme que el motor del UAV gire libremente al rotar en ambas direcciones y que no haya ningún ruido de chirrido debido a la suciedad o los desechos.
- Confirme que la batería del UAV esté asegurada correctamente en la cabina.
- Inspeccione el esqueleto de plástico interno dentro de la cabina. Confirme que no haya grietas ni daños.
- Confirme que el techo de la cabina del UAV esté asegurado.
- Confirme en la sección de la cámara en la parte inferior del UAV que esté centrada la cámara del UAV.
- Confirme que se haya quitado la tapa de la lente de la cámara del UAV.
- Confirme que el compartimento de la cámara del UAV esté correctamente asegurado.
- Confirme que la antena de GNSS esté firmemente conectada.
- Confirme que las rejillas de ventilación en ambos lados del fuselaje del UAV estén libres de suciedad y desechos.
- Controles previos al vuelo completados.