Controles de lanzamiento de UAS
- {VO/FA} Seleccione el botón Flight (Vuelo) en MAVinci Desktop.
- {PIC} Verifique que la pantalla del UAV muestre RC to AP (RC a AP).
- {PIC} Cambie el controlador del RC a automático completo:
- Confirme que la palanca derecha del acelerador esté completamente hacia abajo.
- Confirme que el conmutador amarillo esté configurado en Automatic (Automático).
- Confirme que el conmutador rojo esté configurado en Auto.
- {PIC} Verifique que la pantalla del UAV muestre Launch (Lanzamiento).
- {VO/FA} Verifique en la Vista de mapa en MAVinci Desktop que el icono del UAV se muestre en modo Automatic (Automático).
- {PIC} Confirme que todos los servos para las superficies de control del UAV funcionen correctamente.
- Coloque suavemente los dedos sobre los alerones, así como en los estabilizadores horizontales y verticales para ver si hay resistencia.
- {PIC} Confirme los movimientos de los alerones y los estabilizadores horizontales y verticales:
- Haga rodar el UAV hacia la izquierda y la derecha, y confirme que ambos alerones se estén moviendo.
- Haga subir y bajar el UAV y vea si el estabilizador horizontal se mueve hacia arriba y hacia abajo.
- Haga rodar el UAV en la dirección de guiñada (rumbo) y vea si el estabilizador vertical se mueve hacia la izquierda y hacia la derecha.
Lanzamiento del UAS
- {PIC} Retire la banda de bloqueo de seguridad del motor del UAV y extienda las hélices.
- {PIC} Confirme que todo el personal en el campo se encuentre detrás de las hélices del UAV.
- {PIC} Confirme que el espacio aéreo en el área del proyecto esté libre de todas las demás aeronaves, aves, condiciones climáticas, etc.
- {PIC} Sostenga el UAV de forma segura y verifique que la dirección de lanzamiento sea hacia el viento, lejos del sol y sin obstrucciones.
- {VO/FA} Confirme que todos los elementos de estado del UAS estén en verde en MAVinci Desktop:
- Nivel de batería del UAV - 100 %
- Nivel de batería del conector - 100 %
- Los satélites GPS y GLONASS se están rastreando.
- Solución de calidad de GNSS: RTK fijo
- Compass (Brújula) - Ok (Aceptar)
- El gráfico del altímetro en el lado izquierdo de la pantalla debe actualizarse en tiempo real.
- {PIC} En la dirección de lanzamiento, haga subir el UAV 30 grados hacia el viento.
- {PIC} Mantenga presionado el interruptor de arranque azul del motor del UAV en el fuselaje hasta que la barra de progreso en la pantalla del UAV llegue al 100 %; luego, suéltelo. El motor se encenderá y comenzará a girar.
- Deje que el motor gire durante aproximadamente 3 segundos para que pueda alcanzar la potencia máxima antes del lanzamiento.
- Una vez terminado esto, levante suavemente el UAV para el lanzamiento.
Monitoreo del estado del UAV durante la misión
- {PIC y VO/FA} Después de lanzar el UAV, confirme que este haya alcanzado la altitud de seguridad y haya realizado el círculo de seguridad inicial. Una vez que se complete el círculo de seguridad, confirme que el UAV procede a la primera línea de vuelo.
- Durante la misión, el PIC debe mantener contacto visual con el UAV en todo momento y monitorear el espacio aéreo circundante para controlar la presencia de otras aeronaves, aves, condiciones climáticas adversas, cualquier otra obstrucción, etc.
- Si el espacio aéreo contiene algún peligro para la aeronave a lo largo de la misión, el PIC debe cambiar la aeronave al modo de vuelo asistido y evitar el peligro según sea necesario o aterrizar el avión si es necesario.
- Durante la misión, el VO/FA debe supervisar toda la información de estado del UAS en MAVinci Desktop, incluido lo siguiente:
- Ubicación del UAV en la vista de mapa
- Estado de la batería del UAV y del conector de WLAN
- Calidad de solución de GNSS
- Altitud y velocidad del UAV
- Porcentaje de finalización de la misión
Realizar aterrizaje de deslizamiento en modo asistido
- Una vez que el UAV ha recogido todas las líneas de vuelo de la misión de manera exitosa, regresará al círculo de seguridad inicial alrededor de la posición de inicio. El UAV permanecerá en el círculo de seguridad hasta que el PIC cambie el controlador del RC al modo de vuelo asistido.
- {PIC} Cambie el controlador del RC al modo de vuelo asistido para tomar control del UAV para el aterrizaje.
- {VO/FA} Verifique en la Vista de mapa en MAVinci Desktop que el icono del UAV se muestre en modo de vuelo asistido.
- {PIC} Mientras controla el UAV con el controlador del RC en el modo de vuelo asistido, descienda de forma lenta y firme el UAV y acérquese a la zona de aterrizaje (LZ). Confirme que el UAV aterrizará en el viento.
- {PIC} Logre una altitud de aterrizaje segura (aproximadamente menos de 3 metros de elevación sobre el nivel del suelo [AGL]) cerca de la Zona de reposo (LZ) y luego apague el motor del UAV mediante el interruptor de aterrizaje en el controlador del RC.
Realizar aterrizaje de alerón deflector
- El método de aterrizaje con alerón deflector es una variante del aterrizaje predeterminado de deslizamiento en modo asistido. Los alerones deflectores solo se habilitan cuando el avión está en modo Descending (Descenso) (menos de 20 m AGL).
- Todas las funciones del RC cuando se habilita el aterrizaje de alerón deflector son las mismas que se utilizan con el modoAssisted Flight (Vuelo asistido).
- {PIC} Siga el mismo procedimiento para el aterrizaje en modo asistido una vez que se complete la misión. Sin embargo, una vez que el UAV está por debajo de 20 m AGL, el UAV ascenderá.
- {PIC} Cuando el UAV se mueva hacia arriba, mantenga presionada la palanca izquierda del RC completamente hacia adelante, lo que ralentizará el UAV. Después de perder su velocidad, la aeronave descenderá (con la nariz inclinada hacia arriba) abrupta pero lentamente.
- {PIC} Logre una altitud de aterrizaje segura (aproximadamente menos de 3 metros de elevación sobre el nivel del suelo [AGL]) cerca de la Zona de reposo (LZ) y luego apague el motor del UAV mediante el interruptor de aterrizaje en el controlador del RC.
Controles posteriores al vuelo (UAV)
- {PIC} Después de que el UAV haya aterrizado con éxito, diríjase al sitio de aterrizaje del UAV.
- {PIC} Desarme el motor del UAV presionando el botón azul de activación del motor una vez. Cuando el motor del UAV esté desarmado, el LED en el botón de activación del motor parpadeará lentamente.
- {PIC} Cambie el controlador del RC al modo manual completo. Confirme lo siguiente:
- La palanca derecha del acelerador está completamente bajada.
- El conmutador amarillo está configurado en Automatic (Automático).
- El conmutador rojo está configurado en Manual.
- {PIC} Devuelva el UAV al sitio de lanzamiento.
- NO DESCONECTE LA BATERÍA DEL UAV
Controles posteriores al vuelo (registros de vuelo y fotografías)
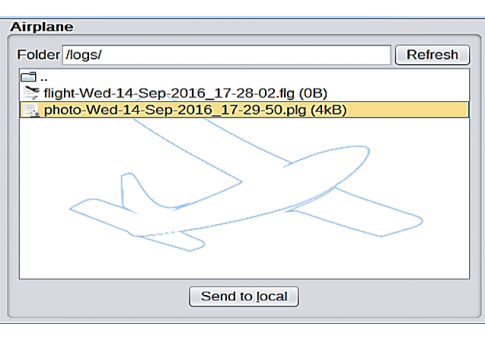
- {VO/FA} En el panel de Session (Sesión), seleccione FTP.
- {VO/FA} En la columna Airplane (Avión), seleccione el registro de fotos de la lista y seleccione Send to Local (Enviar a local) para descargar en el ordenador del usuario.
- {VO/FA} En la columna Airplane, seleccione el registro de vuelos desde la lista y seleccione Send to Local para descargar en el ordenador del usuario.
- {PIC} Después de descargar ambos archivos de registro con éxito, desconecte la batería del UAV.
Controles posteriores al vuelo (generación de coincidencias)
- {PIC} Abra el compartimento de la cámara del UAV y extraiga la tarjeta SD de la cámara.
- {VO/FA} Con el lector USB de tarjetas SD del estuche de transporte, conecte la tarjeta SD al ordenador del usuario.
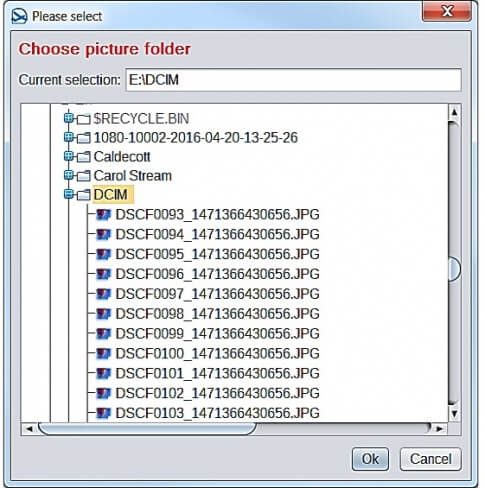
- {VO/FA} Para comenzar el marcado de tiempo de las imágenes capturadas, seleccione Post-Processing (Post-proceso) - Generate Matching (Generar coincidencia) en MAVinci Desktop.
- {VO/FA} Navegue hasta la ubicación de la carpeta DCIM en la tarjeta SD. Una vez terminado, haga clic en OK (Aceptar).
Controles posteriores al vuelo (inspección del UAV)
- {PIC} Realice una inspección de la aeronave posterior al vuelo.
- Confirme que no haya daños evidentes en el fuselaje del UAV, en las alas ni en los estabilizadores horizontales y verticales que pudieran afectar las operaciones de vuelo.
- Confirme que los conectores eléctricos de los estabilizadores horizontales y verticales, y de ambas alas, estén firmemente enchufados.
- Inspeccione que no haya roturas ni daños en las hélices del UAV. Reemplace si es necesario.
- Confirme que las hélices del UAV estén correctamente aseguradas al motor del UAV. Debe haber cierta resistencia al extender/retraer las hélices.
- Confirme que el motor del UAV gire libremente al rotar en ambas direcciones y que no haya ningún ruido de chirrido debido a la suciedad o los desechos.
- Confirme que la batería del UAV esté asegurada correctamente en la cabina.
- Inspeccione el esqueleto de plástico interno dentro de la cabina. Confirme que no haya grietas ni daños.
- Confirme que el techo de la cabina del UAV esté fijado.
- Confirme que el compartimento de la cámara del UAV esté correctamente asegurado.
- Confirme que la antena de GNSS esté firmemente conectada.
- Confirme que las rejillas de refrigeración a ambos lados del fuselaje de UAV no tengan suciedad ni restos.
- {PIC} Realice el control de los estabilizadores. Confirme que ambos estabilizadores estén firmemente sujetados y asegurados al fuselaje.
- Con la nariz del UAV colocada en el zapato del usuario, confirme que haya poco o nada de movimiento al mover el estabilizador horizontal hacia adelante y hacia atrás. Ajuste los tornillos de la superficie aerodinámica con media vuelta cada vez que sea necesario hasta que estén lo suficientemente apretados.
- Confirme que no haya ningún espacio entre la parte inferior del estabilizador horizontal y el fuselaje del UAV.
- {PIC} Realice el control de las alas. Confirme que ambas alas estén firmemente sujetadas y aseguradas al fuselaje.
- Recoja el UAV por el borde delantero de ambas alas.
- Con la nariz del UAV frente al usuario y a 2 o 3 pulgadas de distancia, gire rápidamente el avión hacia adelante y hacia atrás en la dirección de la guiñada.
- Confirme que haya poco o nada de movimiento entre el ala y el montaje del fuselaje. Ajuste los tornillos de la superficie aerodinámica con media vuelta cada vez que sea necesario hasta que estén lo suficientemente apretados.
- {PIC} Realice el control de equilibrio del UAV. Para verificar el equilibrio actual del UAV, haga lo siguiente:
- Tome el UAV armado de los bordes delanteros de las alas.
- Coloque solamente el dedo medio sobre cada una de las marcas de equilibrio ubicadas en la parte inferior de las alas y sostenga el UAV.
- El UAV debe estar nivelado con el suelo y la nariz debe estar ligeramente hacia abajo (aproximadamente 1 grado).
- Ajuste la posición de la batería de polímero de litio dentro de la cabina del UAV si es necesario. Fije la batería de polímero de litio nuevamente una vez completada la carga.
- Los controles posteriores al vuelo se han completado. Proceda a los controles previos al vuelo.