Introducción: Siglas clave
UAS: Sistema de aeronave no tripulada
UAV: Vehículo aéreo no tripulado
AGL: Sobre el nivel del suelo
LiPo: Polímero de litio
VLOS: Línea visual
RC: Control remoto
AOI: Área de interés
GSD: Distancia de muestreo del suelo
GPS: Sistema de posicionamiento global
GNSS: Sistema mundial de navegación por satélite
RTK: Cinemática en tiempo real
GCP: Punto de control terrestre
PIC: Piloto al mando
VO: Observador visual
FA: Auxiliar de vuelo
ATC: Control de tráfico aéreo
VFR: Reglas de vuelo visual
AP: Piloto automático
LZ: Zona de aterrizaje
ARP: Punto de referencia de la antena
IMU: Unidad de medición inercial
WLAN: Red de área local inalámbrica
Componentes del UAS de Sirius PRO
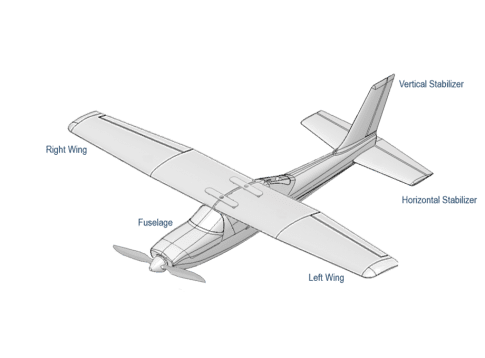
Fuselaje del UAV: contiene los siguientes elementos:
Cámara del UAV
Motor/controlador de velocidad del motor/hélices del UAV
Receptor de GNSS/antena
IMU y barómetro
Receptor del RC
Piloto automático de SIRIUS
Estabilizador vertical: controla el rumbo del avión.
Estabilizador horizontal: controla la altitud del avión.
Alas derecha/izquierda: permiten que el avión gire.
Componentes del UAS de SIRIUS PRO
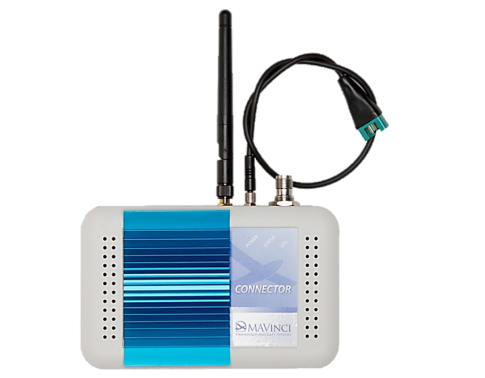
- Conector de WLAN de MAVinci
- Se comunica con el UAV mediante un enlace de 2.4 GHz.
- Transmite las correcciones RTK de GNSS al UAV.
- Se conecta al ordenador del usuario a través de wifi para proporcionarle información de estado del UAV en tiempo real durante el vuelo, incluido lo siguiente:
- Porcentaje de batería del UAV y del conector de WLAN
- Altitud actual y velocidad de avance
- Estado de GNSS
- Porcentaje de compleción de la misión
- Estado de conexión del RC
Componentes del UAS de Sirius PRO
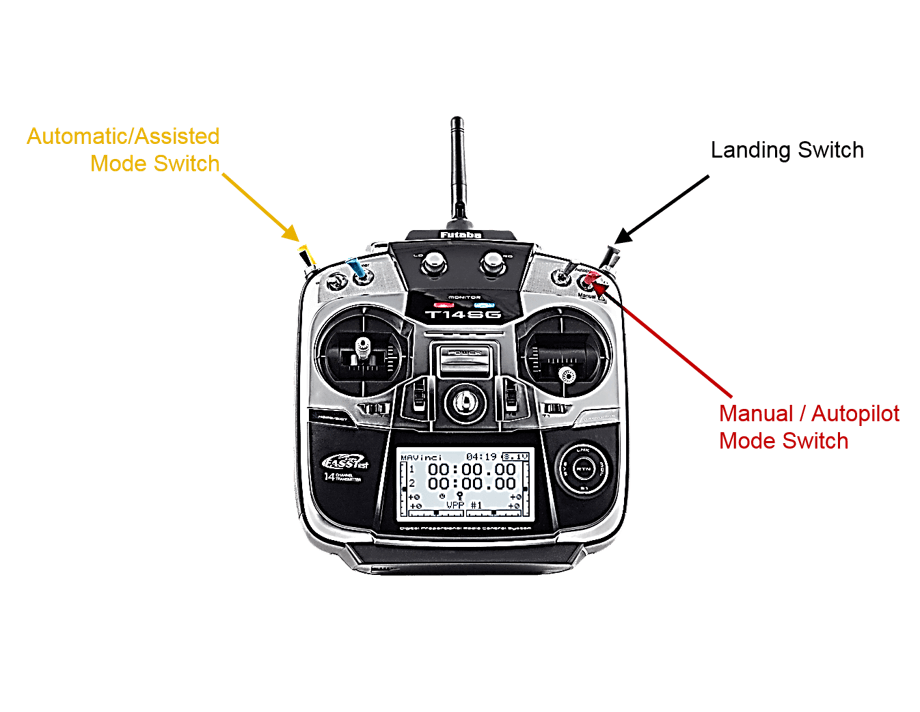
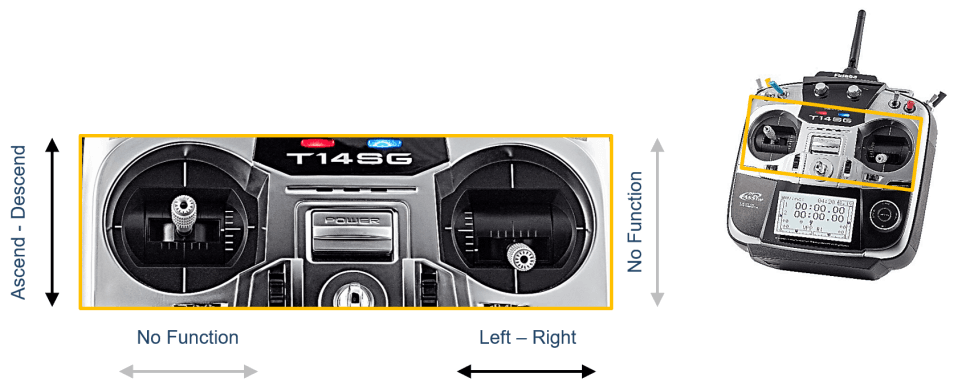
- Transmisor de RC
- Permite al usuario colocar el UAV en cualquiera de los 3 modos de vuelo disponibles para SIRIUS:
- Automatic (Automático): el UAV no reacciona al RC y vuela según el plan de vuelo transmitido.
- Autopilot Assisted (Piloto automático asistido): el acelerador está bloqueado; el usuario controla el ascenso o descenso, y los giros a la izquierda o derecha. El UAV no reacciona ante las señales del RC tan sensiblemente como en el modo manual completo.
- Manual completo: Todas las funciones del RC están disponibles.
- Permite al usuario apagar el motor del UAV (cuando está por debajo de 20 m AGL) con el interruptor de aterrizaje.
- Permite al usuario colocar el UAV en cualquiera de los 3 modos de vuelo disponibles para SIRIUS:
Componentes del UAS de SIRIUS PRO
- Transmisor del RC
- Modo de vuelo automático
Componentes del UAS de SIRIUS PRO
- Transmisor del RC
- Modo manual completo

Componentes del UAS de SIRIUS PRO
- Opciones de carga útil de la cámara
- Carga útil de RGB estándar
- La carga útil de la cámara por defecto para el UAS de SIRIUS incorpora una cámara Fujifilm X-M1 de 16,0 MP.
- La lente utilizada para la Fujifilm X-M1 es una lente XF-18mm f/2.0 R con una distancia focal fija.
- La GSD (tamaño de píxel) mínima para SIRIUS PRO que se puede lograr con esta carga útil es de 1,6 cm.
- Carga útil de RGB estándar

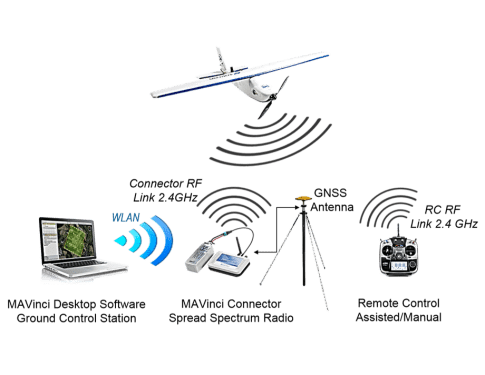
Resumen de comunicación de SIRIUS PRO
- RTK de la base interna para SIRIUS PRO
- El ordenador del usuario se comunica a través de la WLAN con el conector de MAVinci en el software MAVinci Desktop.
- El conector de MAVinci se comunica tanto con el ordenador del usuario a través de la WLAN como con el UAV a través de un enlace de 2,4 GHz.
- La antena de GNSS está conectada al conector de MAVinci para proporcionar la posición de la base de RTK. El conector de MAVinci transmite las correcciones de RTK al UAV a través del enlace de 2,4 GHz.
- El controlador del RC se comunica con el UAV a través de un enlace de 2,4 GHz que es independiente del conector de MAVinci.
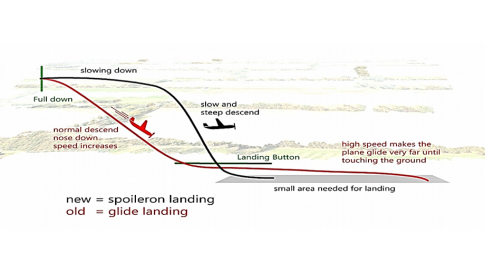
Modos de aterrizaje
- Hay 3 diferentes métodos de aterrizaje disponibles para el UAS de SIRIUS PRO:
- Aterrizaje planeado asistido
- Es el método de aterrizaje predeterminado para el UAS SIRIUS.
- Durante las operaciones de vuelo, el piloto al mando (PIC) usa el controlador del RC para aterrizar el UAV después de completar su misión.
- Con el aterrizaje planeado asistido, la aeronave desciende gradualmente, pero a mayor velocidad.
- Requiere una vía de deslizamiento más extensa una vez que se apaga el motor de la aeronave durante el aterrizaje.
- Aterrizaje planeado asistido
- Existen 3 métodos de aterrizaje diferentes disponibles para el UAS SIRIUS PRO:
- Aterrizaje con alerón spoiler
- Durante las operaciones de vuelo, el piloto al mando (PIC) utiliza el controlador del RC para aterrizar el UAV después de completar su misión.
- Cuando la aeronave está a menos de 20 m AGL, se activan los alerones spoiler para disminuir la velocidad de la aeronave.
- Durante el aterrizaje con alerón spoiler, la aeronave desciente bruscamente pero a menor velocidad.
- Requiere una vía de deslizamiento más corta una vez que se apaga el motor de la aeronave durante el aterrizaje.
- Aterrizaje con alerón spoiler
- Existen 3 métodos de aterrizaje diferentes disponibles para el UAS SIRIUS PRO:
- Spot Landing (Aterrizaje preciso)
- Método automático de aterrizaje en un punto de aterrizaje especificado.
- La aproximación al punto de aterrizaje viene determinada automáticamente por el software MAVinci Desktop.
- Durante el aterrizaje preciso, el avión desciende bruscamente pero a una velocidad más lenta.
- Exige la funcionalidad RTK de GNSS para operar.
- Spot Landing (Aterrizaje preciso)