Preparación de UAS - Control de temporización/disparo de la cámara
- Conecte una antena de GNSS externa al puerto de antena de GNSS del conector de WLAN.
- Coloque el UAV y el conector de WLAN en condiciones GNSS a cielo abierto.
- Abra MAVinci Desktop. Cree/abra una sesión.
- Encienda y conéctese al conector de WLAN y el UAV en MAVinci Desktop.
- Permita que tanto el conector de WLAN como el UAV rastreen los satélites de GNSS durante aproximadamente 10 a 15 minutos. Configure el RTK de base interna y transmita las correcciones de RTK al UAV.
- Cree un nuevo plan de vuelo (es decir, polígono básico, terreno, etc.) cerca de donde se encuentran actualmente el UAV y el conector de WLAN en la vista de mapa.
- Seleccione Edit (Editar) - Recalculate Flight Plan (Recalcular plan de vuelo).
- Seleccione Flight Plan - Transmit Flight Plan to plane (Plan de vuelo - Transmitir plan de vuelo a la aeronave).
- Seleccione Ok (Aceptar) en la ventana Check Wing Connection (Controlar conexión de ala) que aparece.
- Confirme que el plan de vuelo se haya transmitido al UAV.
- Abra el compartimento de la cámara del UAV.
- Inserte la tarjeta SD de la cámara.
- Cierre el compartimiento de la cámara del UAV.
- Haga rodar el fuselaje del UAV 60 grados. Confirme que la cámara del UAV dispare una imagen. El sonido del disparo de la cámara del UAV se podrá escuchar.
- Capture 10 imágenes con el UAV girado a 60 grados.
- Abra el compartimento de la cámara del UAV y retire la tarjeta SD de la cámara.
- Inserte la tarjeta SD de la cámara en el ordenador del usuario. Confirme que las 10 imágenes disparadas se almacenen en la tarjeta SD.
- Confirme que la hora de UTC actual esté asociada a cada imagen tomada.
- Una vez finalizado, apague tanto el conector de WLAN como el UAV y retire la batería LiPo de la cabina del UAV.
Verificación de la superficie de control (montaje)
- Para obtener detalles sobre el montaje de aeronaves, consulte la lista de verificación de montaje del UAV en la sección 4.2.2 del manual del usuario de MAVinci.
- Retire el fuselaje del UAV del estuche de transporte.
- Retire la manga de plástico que se encuentra alrededor del fuselaje.
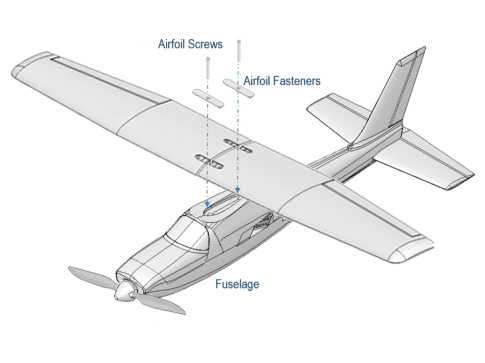
- Prepare cuatro tornillos y sujetadores de superficie aerodinámica y un destornillador de punta plana.
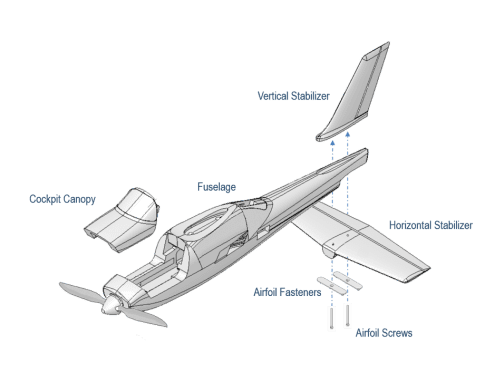
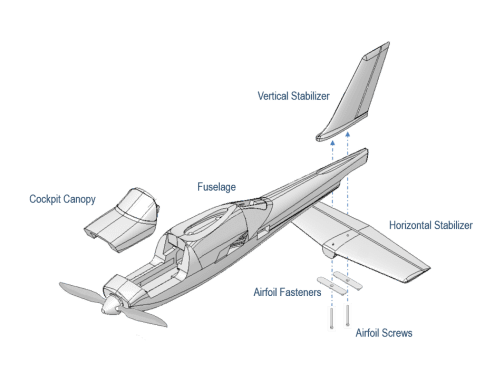
- Retire el estabilizador vertical y horizontal del estuche de transporte.
- Levante el fuselaje del UAV y con la punta de la aeronave firmemente colocada en el zapato del usuario (y no en el suelo), coloque el estabilizador vertical en el fuselaje.
- Fije el estabilizador horizontal al fuselaje del UAV y asegúrese de que no haya espacio entre la parte inferior del estabilizador horizontal y el fuselaje del UAV.
- Inserte 2 tornillos y sujetadores de superficie aerodinámica a través de los orificios ubicados en la parte inferior del estabilizador horizontal. Primero, apriete los tornillos a mano, luego con el destornillador de punta plana, fije ambos estabilizadores al fuselaje del UAV. No apriete demasiado los tornillos.
- Confirme que los estabilizadores horizontales y verticales estén firmemente sujetados y fijados al fuselaje:
- Debe haber poco o nada de movimiento al mover el estabilizador horizontal hacia adelante y hacia atrás. Ajuste la tensión del tornillo, según sea necesario, con media vuelta.
- No debería haber ningún espacio entre la parte inferior del estabilizador horizontal y el fuselaje del UAV.
- Conecte los conectores eléctricos para los estabilizadores horizontales y verticales al fuselaje.
Verificación de la superficie de control (montaje) - Continuación
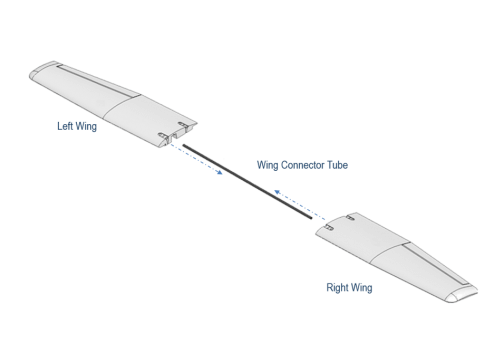
- Retire el tubo conector de las alas izquierda y derecha de la plantilla de espuma superior del estuche de transporte.
- Con una cinta métrica, ubique el centro del tubo conector del ala. Marque el centro con un marcador o un trozo pequeño de cinta adhesiva blanca.
- Retire las alas izquierda y derecha del UAV del estuche de transporte.
- Inserte el tubo conector del ala en cualquiera de las alas hasta alcanzar el centro del tubo. Repita este proceso para el ala restante, de modo que la mitad del tubo conector del ala se inserte en ambas alas.
Verificación de la superficie de control (montaje) - Continuación
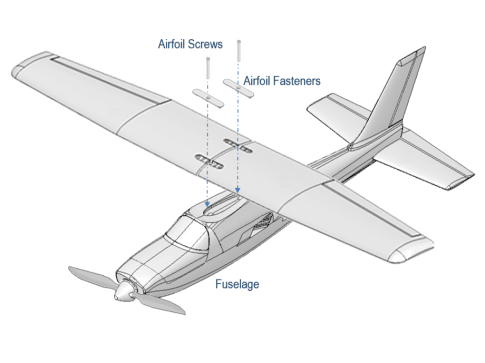
- Coloque el borde delantero de ambas alas alineado con la parte posterior de la cabina del UAV.
- Inserte 2 tornillos y sujetadores de superficie aerodinámica a través de los orificios ubicados en la parte superior de las alas.
- Primero, apriete a mano los tornillos y luego use el destornillador de punta plana para fijar ambas alas al fuselaje del UAV. No apriete demasiado los tornillos.
- Confirme que ambas alas estén firmemente sujetadas y fijadas al fuselaje.
- Recoja el UAV por el borde delantero de ambas alas.
- Con la nariz del UAV frente al usuario y a 2 o 3 pulgadas de distancia, gire rápidamente el avión hacia adelante y hacia atrás en la dirección de la guiñada.
- Debe haber poco o nada de movimiento entre el ala y el montaje del fuselaje. Ajuste la tensión del tornillo, según sea necesario, con media vuelta.
- Conecte los conectores eléctricos para ambas alas al fuselaje del UAV.
- Conector eléctrico del ala izquierda al conector izquierdo en el fuselaje del UAV. Derecho con derecho.
Verificación de la superficie de control (RC)
- Retire la banda de bloqueo de seguridad del motor alrededor de las hélices y retire el techo de la cabina del UAV.
- Encienda el UAV al colocar una batería LiPo cargada en la cabina, fíjela con la correa de la batería y conecte el cable de la batería LiPo.
- Reemplace el techo de la cabina del UAV y reemplace la banda de bloqueo de seguridad del motor alrededor de las hélices.
- Después de encender el UAV, todos los servos de las alas y los estabilizadores se encenderán y se escucharán.
- Cambie el controlador del RC al modo manual completo. Confirme lo siguiente:
- La palanca derecha del acelerador está completamente hacia abajo.
- El conmutador amarillo está configurado en Automatic (Automático).
- El conmutador rojo está configurado en Manual.
- Encienda el controlador del RC. Después de encender el RC, todos los servos de las alas y los estabilizadores ya no se escucharán.
- Mueva la palanca de control izquierda hacia la izquierda y hacia la derecha. Confirme que el servo del estabilizador vertical responda a los controles del RC y que el estabilizador pueda moverse libremente.
- Mueva la palanca de control izquierda hacia arriba y hacia abajo. Confirme que el servo del estabilizador horizontal responda a los controles del RC y que el estabilizador pueda moverse libremente.
- Mueva la palanca de control derecha hacia la izquierda y hacia la derecha. Confirme que los servos para ambos alerones respondan a los controles del RC y que los alerones puedan moverse libremente.
- Apague el controlador del RC.
Verificación de la superficie de control (RC)
- Abra MAVinci Desktop. Cree/abra una sesión.
- Encienda el conector de WLAN y conéctelo al conector de WLAN y al UAV.
- Confirme que la información de estado del UAV en la vista de mapa informe sobre un error por falla de enlace a RC.
- Encienda el controlador del RC.
- Confirme que el error por falla de enlace a RC haya desaparecido.
- Desconecte el conector de WLAN y el UAV.
Verificación de la superficie de control (desmontaje)
- Para obtener detalles sobre el desmontaje de la aeronave, consulte la lista de verificación de desmontaje del UAV en la sección 4.2.8 del manual del usuario de MAVinci.
- Retire la banda de bloqueo de seguridad del motor alrededor de las hélices y retire el techo de la cabina del UAV.
- Desconecte y quite la batería LiPo del UAV.
- Reemplace el techo de la cabina del UAV y reemplace la banda de bloqueo de seguridad del motor alrededor de las hélices.
- Apague el controlador del RC.
- Desconecte ambos conectores eléctricos de las alas del fuselaje del UAV.
- Con un destornillador de punta plana, quite los tornillos y los sujetadores de la superficie aerodinámica utilizados para fijar las alas.
- Levante las alas del fuselaje del UAV por el borde delantero y separe las alas izquierda y derecha.
- Regrese el ala izquierda (o derecha) al estuche de transporte.
- Retire el tubo conector de ala del ala restante y regréselo al estuche de transporte.
Verificación de la superficie de control (desmontaje) - Continuación
- Devuelva el ala restante al estuche de transporte.
- Levante el fuselaje del UAV y coloque firmemente el morro del fuselaje en el zapato del usuario.
- Desconecte los conectores eléctricos para los estabilizadores horizontales y verticales.
- Con un destornillador de punta plana, retire los tornillos de la superficie aerodinámica y los sujetadores utilizados para asegurar los estabilizadores
- Regrese el estabilizador horizontal y vertical al estuche de transporte.
- Reemplace la manga de plástico alrededor del fuselaje y regrese el fuselaje del UAV al estuche de transporte.
- Regrese el controlador del RC al estuche de transporte.
- Regrese el conector de WLAN al estuche de transporte.
- Regrese todos los tornillos y sujetadores de la superficie aerodinámica al estuche de transporte.
- Devuelva todos los demás componentes de UAS al estuche.
- Proceda al sitio del proyecto de UAS.