Préparation du drone - Configuration RTK de base externe
- Placez le récepteur GNSS et le drone dans un environnement GNSS dégagé.
- Ouvrez MAVinci Desktop. Créez/ouvrez une session.
- Allumez le récepteur GNSS.
- Allumez et connectez-vous au connecteur WLAN et au drone dans MAVinci Desktop.
- Patientez environ 10 à 15 minutes jusqu'à ce que le récepteur GNSS et le drone suivent les satellites GNSS.

-
Connectez le récepteur GNSS externe au PC de l'utilisateur via une connexion Bluetooth ou par câble série.
- Notez le port COM utilisé pour la connexion série.
- Téléchargez et installez la dernière version de TRU de Topcon TotalCare pour le PC.
- Ouvrez le logiciel Topcon Receiver Utility (TRU).
- Sélectionnez Device - Application Mode - Receiver Managing. Sélectionnez Device - Connect.
-
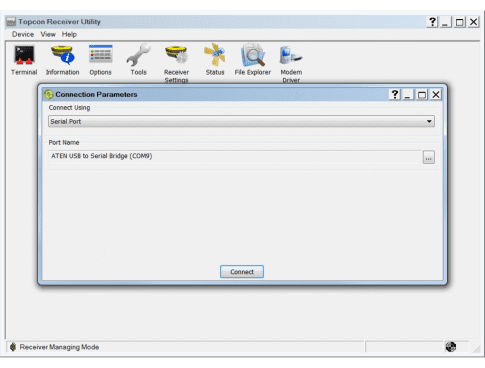
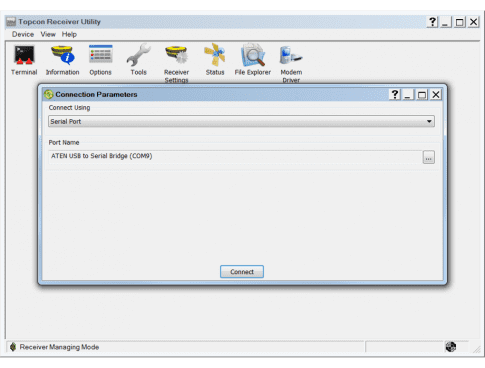
Dans l'écran Connection Parameters, effectuez les sélections suivantes :
- Si vous utilisez une connexion par câble série, cliquez sur le bouton Configuration et sélectionnez le bon port COM auquel le récepteur est connecté sur le PC.
- Si vous utilisez une connexion Bluetooth, cliquez sur le bouton Configuration et sélectionnez un récepteur utilisé précédemment ou ajoutez un nouveau récepteur auquel se connecter via Bluetooth.
- Notez que vous ne pouvez pas utiliser le même port de récepteur auquel vous êtes connecté afin de configurer le récepteur pour transmettre les corrections RTK sur ce même port.
- Une fois que vous avez terminé, sélectionnez Connect pour vous connecter au récepteur via un câble série ou Bluetooth.
- Une fois connecté au récepteur, sélectionnez Receiver Settings - Tracking and Positioning.
- Sélectionnez l'onglet Base.
- Sélectionnez le type d'antenne dans le menu déroulant.
- Sélectionnez les coordonnées de la station de base comme point de référence de l'antenne.
-
Cliquez sur le bouton Configuration, puis sélectionnez Get from the Receiver.
- Calculez la position moyenne du récepteur pendant 60 s et cliquez sur OK.

- Une fois le type et la position de l'antenne configurés, cliquez sur OK.
- Sélectionnez Ports.
- Double-cliquez sur le port série du récepteur qui sera utilisé pour diffuser en continu les corrections RTK.
-
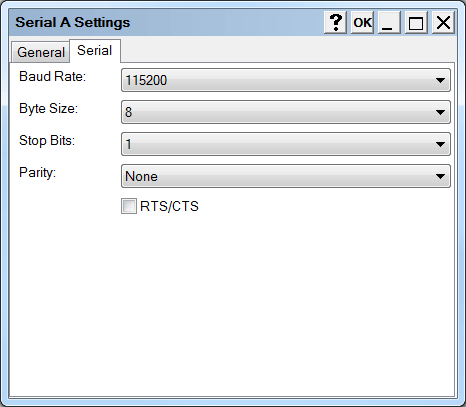
Sélectionnez l'onglet Serial dans l'écran des paramètres du port série. Confirmez les paramètres suivants :
- Baud Rate - 115 200
- Byte Size - 8
- Stop Bits - 1
- Parity - None
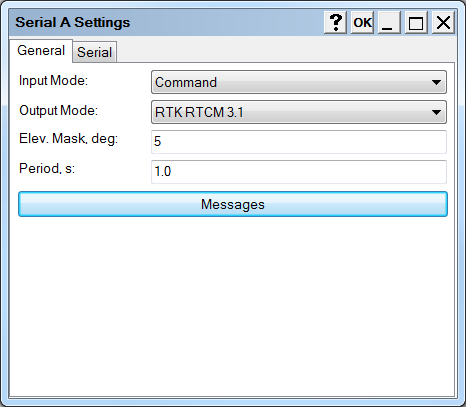
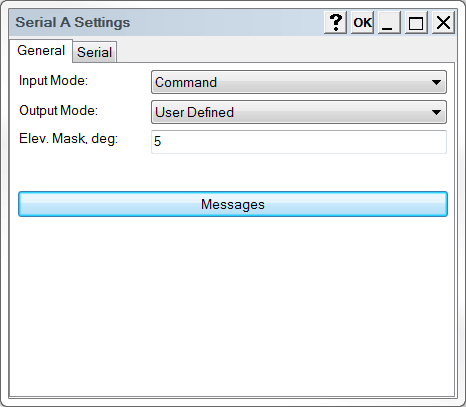
- Sélectionnez l'onglet General dans l'écran des paramètres du port série.
- Sélectionnez le mode de sortie RTK RTCM 3.1 (3.x) dans le menu déroulant.
-
Sélectionnez la ou les durée(s) de transmission des corrections RTK.
- Pour les connexions série, entrez 1,0 seconde.
- Pour les connexions Bluetooth, entrez 0,5 seconde.
- Cliquez sur le bouton Messages.
-
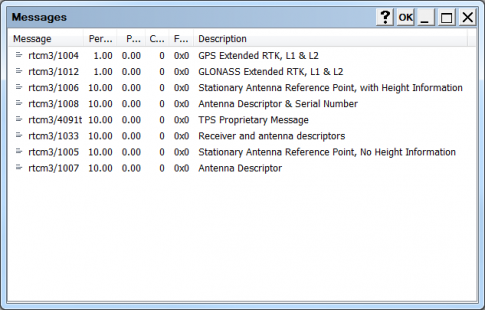
Confirmez que les messages RTCM 3.1 suivants sont actifs pour MAVinci Desktop :
- 1004, 1005, 1006, 1007, 1008, 1012
- Pour ajouter de nouveaux messages à transmettre, cliquez avec le bouton droit de la souris sur la fenêtre Messages et sélectionnez Add New Messages.
- Développez la liste rtcm3. Double-cliquez sur tous les types de message requis. Lorsque vous avez terminé, cliquez sur OK.
- Confirmez que tous les messages requis sont maintenant actifs sur le récepteur. Lorsque vous avez terminé, cliquez sur OK.
- Cliquez sur OK sur l'écran des paramètres du port série pour enregistrer les paramètres sur le récepteur.
- Quittez l'écran Receiver Ports.
- Sélectionnez Device - Disconnect (Appareil - Déconnecter).
- Fermez TRU.
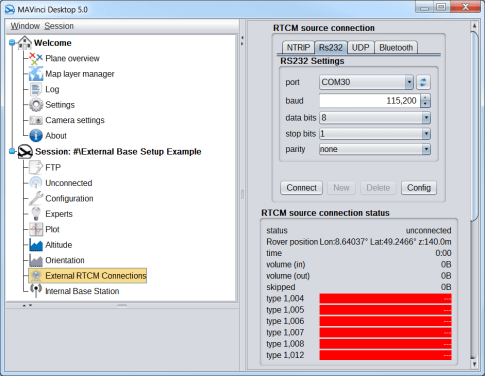
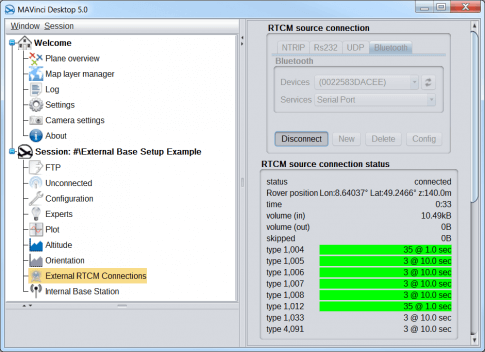
- Dans la session MAVinci Desktop, sélectionnez l'option External RTCM Connections.
-
Dans la section RTCM Source Connection, sélectionnez les éléments suivants :
- Si vous utilisez une connexion série, sélectionnez l'onglet RS232.
- Si vous utilisez une connexion Bluetooth, sélectionnez l'onglet Bluetooth.
- Si vous utilisez une connexion série, confirmez les paramètres du port et sélectionnez le port COM auquel le récepteur est connecté sur le PC de l'utilisateur.
-
Si vous utilisez une connexion Bluetooth, à l'aide du bouton Refresh, recherchez le nom de l'appareil Bluetooth du récepteur GNSS.
- Le nom de l'appareil peut s'afficher en tant qu'adresse Bluetooth du récepteur et pas sous la forme de son numéro de série.
- Quelle que soit la méthode de connexion, sélectionnez Connect pour commencer à diffuser en continu les corrections RTK.
-
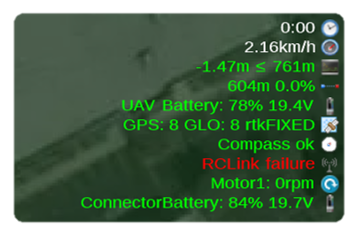
Vérifiez les points suivants :
- L'état du récepteur est Connected.
- Le nombre d'octets ignorés n'augmente pas.
- Confirmez que tous les messages RTCM nécessaires sont reçus et affichés en vert.
- Revenez à la vue Map.
- Vérifiez dans les informations d'état du drone que ce dernier détecte une solution RTK Fixed.