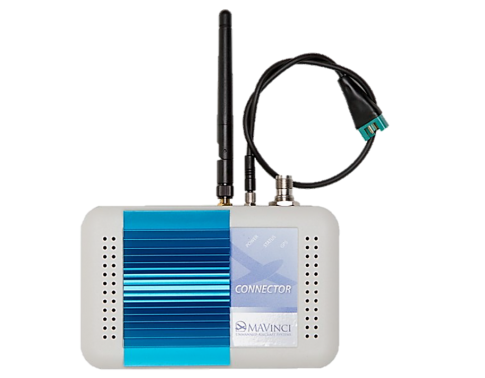
Conexión al conector de WLAN
- Retire el conector de WLAN del estuche de transporte.
- Conecte el cable de la batería LiPo y la antena inalámbrica al conector de WLAN.
- Para encender el conector de WLAN, conecte una batería LiPo cargada al cable de la batería LiPo. Confirme que el LED de encendido se ilumine.
- Después de 30 a 60 segundos, el LED de estado en el conector de WLAN debería comenzar a parpadear rápidamente.
Conexión al conector de WLAN (continuación)
- En el ordenador del usuario, busque redes inalámbricas disponibles. Conéctese al conector de MAVinci.
- Ingrese la contraseña de red como mavinciconnector
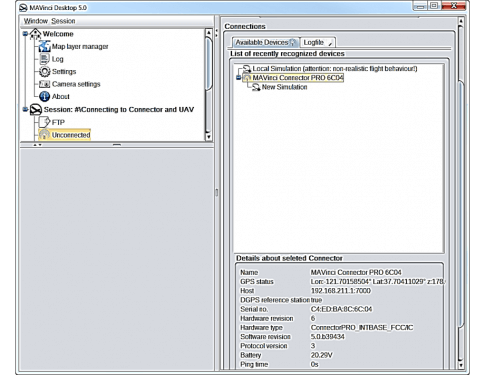
- Abra MAVinci Desktop. Cree/abra una sesión.
- En el panel de Session (Sesión) en la parte superior izquierda de la pantalla, seleccione la opción Unconnected (No conectado).
- Confirme en la pestaña Available Devices (Dispositivos disponibles) que aparece el conector MAVinci.
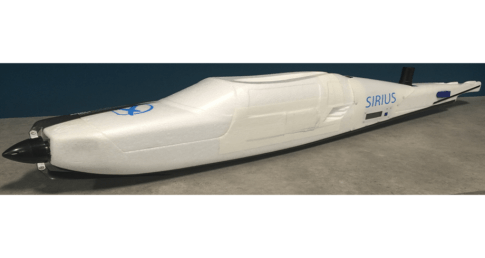
Conexión al UAV
- Retire el fuselaje del UAV del estuche de transporte.
- Retire la manga de plástico y la banda de bloqueo de seguridad del motor del fuselaje.
- Gire ligeramente el motor del UAV para que las hélices no obstruyan el techo de la cabina.
- Retire el techo de la cabina del fuselaje.
- Coloque una batería LiPo cargada en la cabina y fíjela con la correa de la batería ubicada en la cabina.
- Conecte el cable de la batería LiPo al conector correspondiente en la cabina del UAV.
- Reemplace el techo de la cabina y la banda de bloqueo de seguridad del motor.
- Después de aproximadamente 30 a 60 segundos, confirme que el UAV se haya inicializado al verificar la pantalla de visualización integrada, que incluye lo siguiente:
- Estado de la batería del UAV
- Estado de los satélites de GNSS
- Mensajes de estado del UAV, incluido lo siguiente:
- «Waiting for GPS Time» (Esperando tiempo de GPS)
- «Send Flightplan» (Enviar plan de vuelo)
Conexión al UAV (continuación)
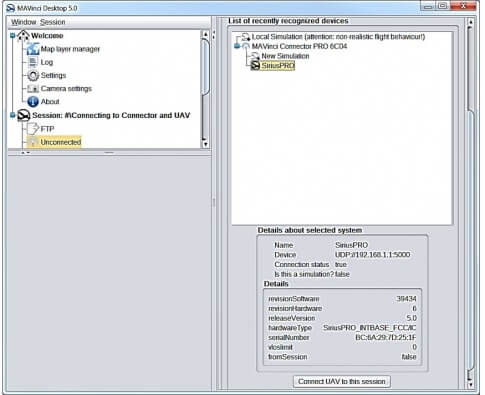
- En la sesión de MAVinci Desktop, en el panel de Session (Sesión), seleccione la opción Unconnected (No conectado) .
- Confirme en la pestaña Available Devices (Dispositivos disponibles) que aparezca Sirius PRO.
- Seleccione Sirius PRO en la pestaña Available Devices.
- Seleccione Connect UAV to this session (Conectar UAV a esta sesión).
- Tenga en cuenta que para que el usuario pueda conectarse al UAV, primero debe completarse la conexión con el conector de WLAN.
Conexión al UAV (continuación)
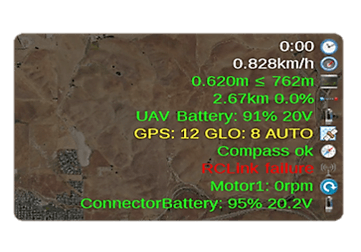
- Confirme que la información de estado del UAS se esté actualizando en tiempo real en la vista de mapa, que incluye lo siguiente:
- Estado de la batería del UAV y del conector
- Estado del satélite de GNSS
- Altitud actual
- Estado de la brújula
- Cualquier mensaje de error/advertencia
- Confirme que el gráfico de altímetro debajo del panel de sesión se esté actualizando en tiempo real (requiere una solución de posición de GNSS).
- Confirme que la opción Unconnected en el panel de sesión ahora diga Plane: SiriusPRO.
Actualización del firmware del UAV/conector
- Abra MAVinci Desktop. Cree/abra una sesión.
- Conéctese al conector de WLAN y al UAV.
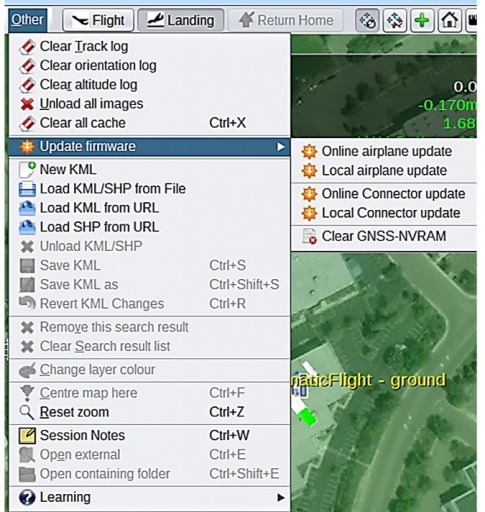
- Para el conector de WLAN, seleccione Other (Otro) - Update firmware (Actualizar firmware) - Online Connector update (Actualización del conector en línea).
- Si hay una actualización de firmware disponible, siga las instrucciones en pantalla para llevar a cabo la actualización.
- La actualización del firmware tardará varios minutos en completarse. Una vez que haya finalizado, el LED de estado en el conector de WLAN parpadeará rápidamente de nuevo.
- Para el UAV, seleccione Other (Otro) - Update firmware - Online airplane update (Actualizar firmware - Actualización del avión en línea).
- Si hay una actualización de firmware disponible para el UAV, siga las instrucciones en pantalla para llevar a cabo la actualización.
- La actualización del firmware tardará varios minutos en completarse. Una vez terminado, confirme que el UAV se haya inicializado a través de la pantalla integrada.
- Vuelva a conectarse al UAV en MAVinci Desktop.
Configuración de RTK de la base interna
- Conecte una antena de GNSS externa al puerto de antena de GNSS del conector de WLAN.
- Coloque el UAV y el conector de WLAN en condiciones GNSS a cielo abierto.
- Abra MAVinci Desktop. Cree/abra una sesión.
- Conéctese al conector de WLAN y al UAV en MAVinci Desktop.
- Permita que tanto el conector de WLAN como el UAV rastreen los satélites de GNSS durante aproximadamente 10 a 15 minutos.

Configuración de RTK de la base interna (continuación)
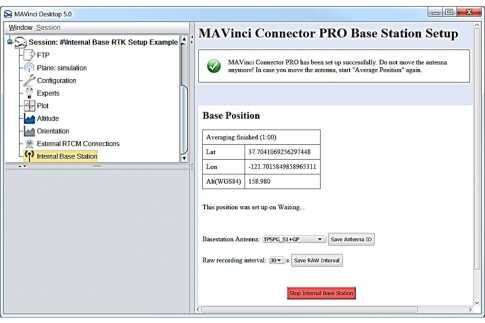
- En el panel de sesión, seleccione Internal Base Station (Estación base interna).
- Seleccione el tipo de antena de la estación base conectada al conector de WLAN desde el menú desplegable.
- Seleccione el intervalo de grabación de datos brutos desde el menú desplegable.
- Seleccione Start Internal Base Station (Iniciar estación base interna).
- Tenga en cuenta que la estación base interna se iniciará automáticamente si se coloca en una posición previamente utilizada.
Configuración de RTK de la base interna (continuación)
- Regrese a la vista de mapa.
- Confirme en la información de estado del UAS que el UAV informa una solución de RTK corregida.
- Conecte una antena de GNSS externa al puerto de antena de GNSS del conector de WLAN.
- Coloque el UAV y el conector de WLAN en condiciones GNSS a cielo abierto.
- Abra MAVinci Desktop. Cree/abra una sesión.
- Conéctese al conector de WLAN y al UAV en MAVinci Desktop.
- Permita que tanto el conector de WLAN como el UAV rastreen los satélites de GNSS durante aproximadamente 10 a 15 minutos.

Transmitir un plan de vuelo
- Cree un nuevo plan de vuelo (es decir, polígono básico, terreno, etc.) cerca de donde se encuentran actualmente el UAV y el conector de WLAN en la vista de mapa.
- Seleccione Edit (Editar) - Recalculate Flight Plan (Recalcular plan de vuelo).
- No separe el plan de vuelo si se le solicita y acuse recibo de cualquier mensaje de advertencia que aparezca.
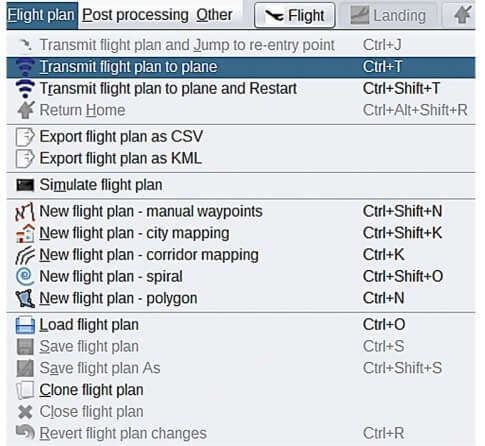
- Seleccione Flight Plan (Plan de vuelo) - Transmit Flight Plan to plane (Transmitir plan de vuelo a la aeronave).
- Seleccione Ok (Aceptar) en la ventana Check Wing Connection (Controlar conexión de ala) que aparece.
Transmitir un plan de vuelo (continuación)
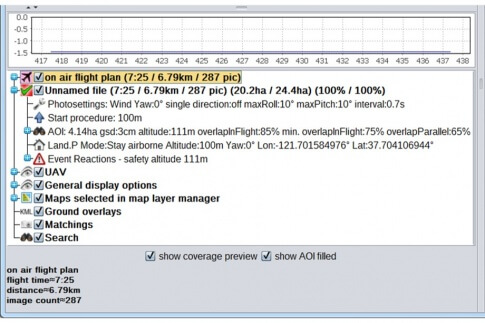
- Confirme que el plan de vuelo se haya transmitido al UAV mediante la verificación de lo siguiente:
- En el panel de detalles, confirme que las métricas para created flight plan (plan de vuelo creado) sean idénticas a las métricas de on air flight plan (plan de vuelo en el aire).
- Las líneas de vuelo para on air flight plan se mostrarán en la vista de mapa en color rosa.