What is Cloud-to-Cloud Registration?
- When two or more clouds are integrated based on a 3D shape.
-
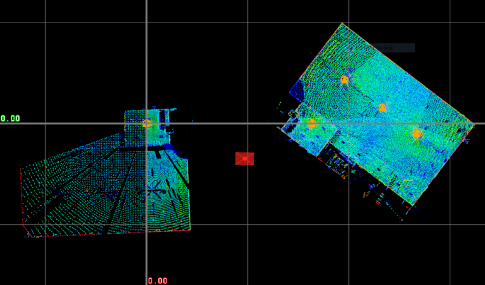
In order for Cloud-to-Cloud to work you will need the following:
- There should be an overlapping area between the scan position data
- There should be sufficient “distinct and characteristic shapes” in the overlapping area.
- Execute with the scan data position and specification roughly matches as initial condition
- Align by methods such as occupation point/backsight point method, resection method, and manual registration to roughly match the positions.
When can I use Cloud-to-Cloud?
- It can be used without registration with tie points or occupation point/backsight point, or manual registration
- After executing occupation point/backsight point registration
- After executing tie point registration
- After executing manual registration
This can be done to improve the integrated data.
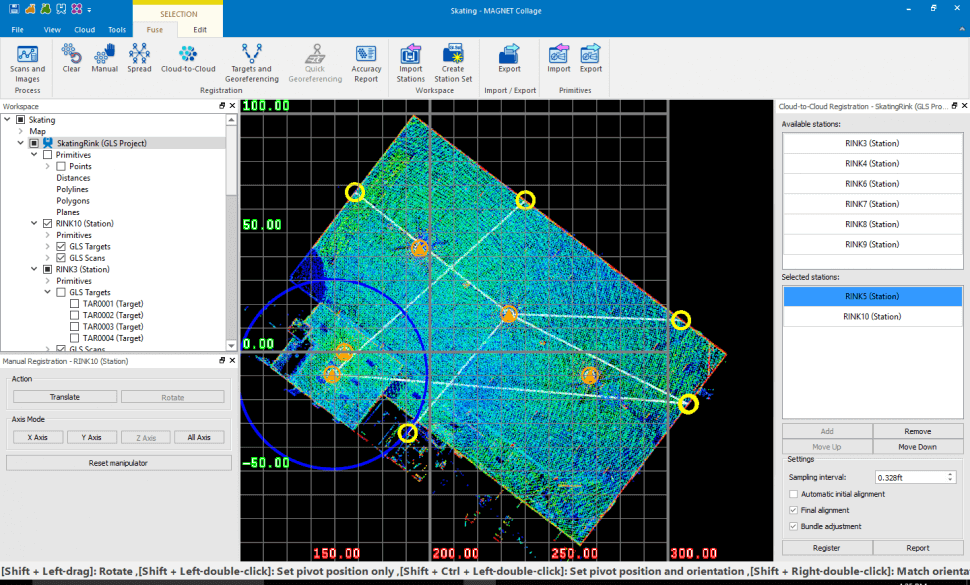
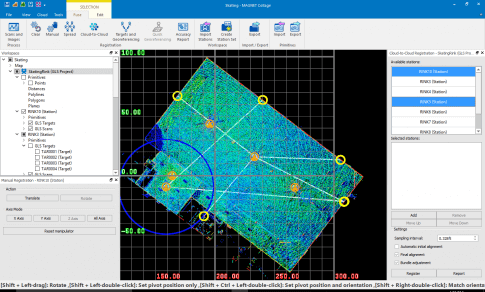
How to use Cloud-to-Cloud Registration
- Select the scan position that needs to be registered.
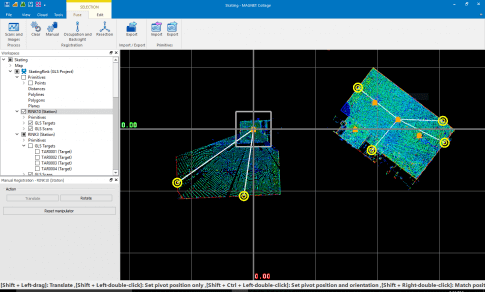
- Go to Ribbon – select Fuse > Manual
- Use Shift + Left-drag to translate the scan position to the desired position
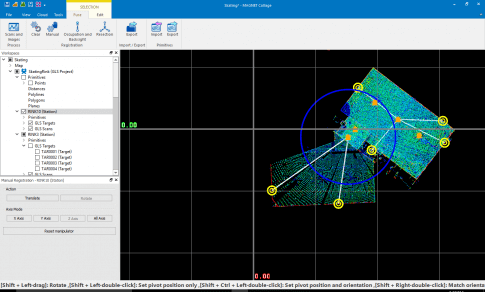
- Select Rotate under Manual Registration on left
- Use Shift + Left-drag to rotate the scan position to the desired orientation.
- Select the Model and go to Fuse
- Select Cloud-to-Cloud.
- Select the one scan position that needs to be registered and one that has good overlap
-
Touch Add to Selected Stations
- Move the scan station with the most overlap to the top
- Click Register.